单摄像头SLAM技术研究与实现毕业论文
2020-04-12 08:47:56
摘 要
移动机器人同步定位与地图构建(Simultaneous Localization and Mapping,以下简称SLAM)是当下的机器人研究中最受关注的问题之一,在机器人由理论研究向实际应用发展的道路上有非常重要的意义。SLAM的问题可以被描述为:机器人出发的起点未知,中途经过的环境也未知,只能在运动过程中根据自身传感器接收到的周围环境信息及摄像机位姿等估计运动轨迹和创建增量式地图,同时利用该地图不断更新自己的位置和路径,以达到定位的功能。
本文基于单摄像头设计并实现了一个视觉SLAM系统,针对传统SLAM方法存在的问题,如提取效率偏低,实时性较差等进行了一定的改进。首先通过SLAM方案的优缺点及实施可行度的对比,选择 PTAM技术构建SLAM平台;其后,针对原系统采用FAST算子进行特征点检测时,不具有方向性的缺点,以及没有进行重复场景回环的缺陷,采用亮度质心技术及闭环检测的方法加以优化。
实验结果表明,该方案确实能在一定程度上提高算法的效率,证明了本文SLAM优化方法的有效性。
关键词:同步定位与地图构建 单目视觉 特征检测 PTAM关键帧
Abstract
Mobile robot Simultaneous Localization and Mapping (hereinafter referred to as SLAM) is one of the most concerned issues in current robotics research. It has a very important significance in the development of robots from theoretical research to practical application. The problem of SLAM can be described as: the starting point of the robot's departure is unknown, and the environment passing through the middle is unknown. It is only possible to estimate the motion trajectory and create an incremental map based on the surrounding environment information received by the sensor and the pose of the camera during the movement. , while using the map to constantly update their location and path to achieve the positioning function.
In this paper, a visual SLAM system is designed and implemented based on a single camera. The problems existing in traditional SLAM methods such as low extraction efficiency and poor real-time performance have been improved. Firstly, through the comparison of the advantages and disadvantages of the SLAM scheme and the feasibility of implementation, the SLAM platform was selected based on the PTAM technology. Then, when using the FAST operator to perform feature point detection in the original system, it had no directionality and did not perform loopback. The defects are optimized using the luminance center of mass technique and the closed-loop detection method.
Experimental results show that the scheme can indeed improve the efficiency of the algorithm to a certain extent, and proves the effectiveness of the SLAM optimization method in this paper.
Keywords: simultaneous localization and map building, monocular vision, Feature detection, PTAM key frame
目 录
第1章 绪论 1
1.1 研究背景、目的与意义 1
1.2 国内外研究状况概述 2
1.2.1 国内研究概况 2
1.2.2 国外研究概况 2
1.3 本文内容与架构安排 3
1.3.1 主要研究内容 3
1.3.2 架构安排 3
第2章 基于单目视觉SLAM的基本原理及方法 5
2.1 单目视觉SLAM问题概述 5
2.2 单目视觉SLAM方法的发展 6
2.2.1 基于特征的SLAM方法 6
2.2.2 直接的SLAM方法 9
2.2.3 各种算法的比较与选择 10
2.3 本章小结 10
第3章 PTAM关键帧算法及其实现 11
3.1 PTAM特征算法原理简介 11
3.2 追踪线程 11
3.2.1 FAST特征提取 12
3.2.2 地图初始化与跟踪定位 12
3.2.3 关键帧的选择 13
3.3 绘制线程 14
3.4 主要缺陷及其改良 14
3.4.1 旋转不变性改良 15
3.4.2 闭环检测改良 15
3.5 本章小结 16
第4章 系统调试与功能展示 17
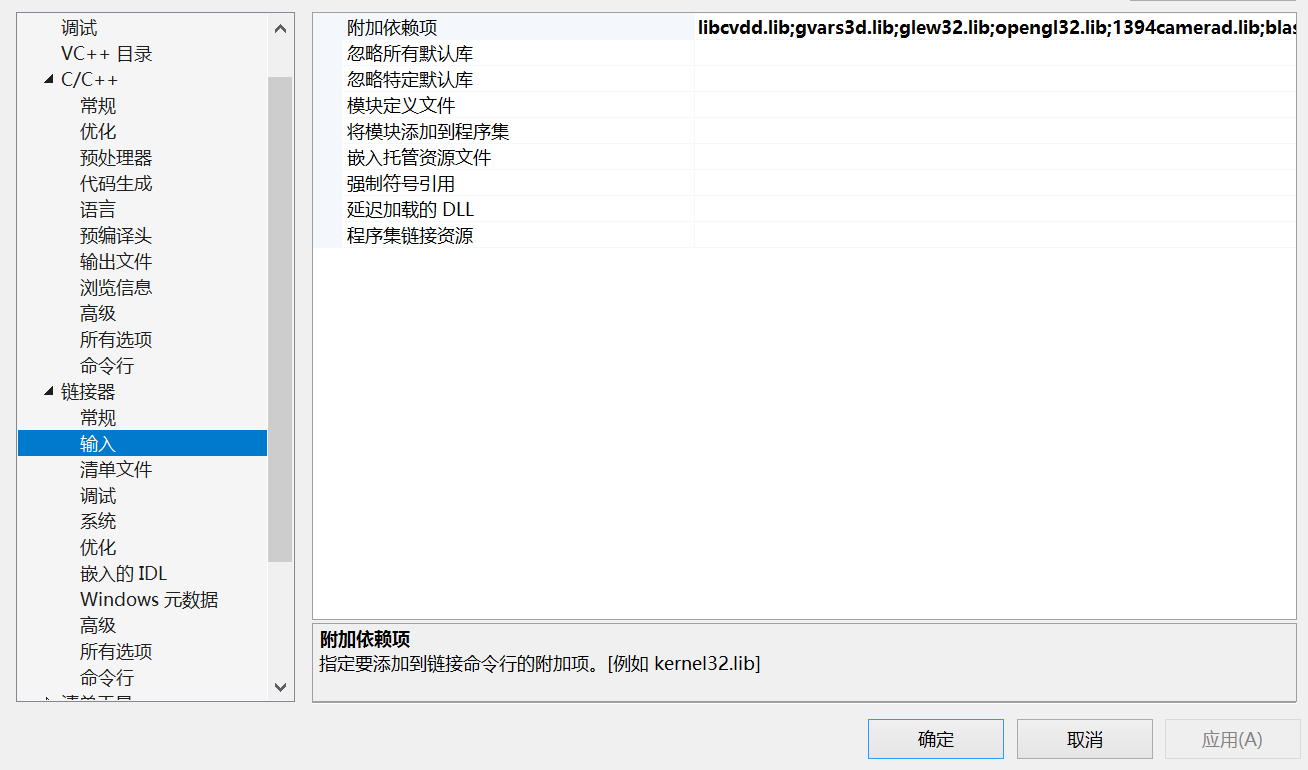
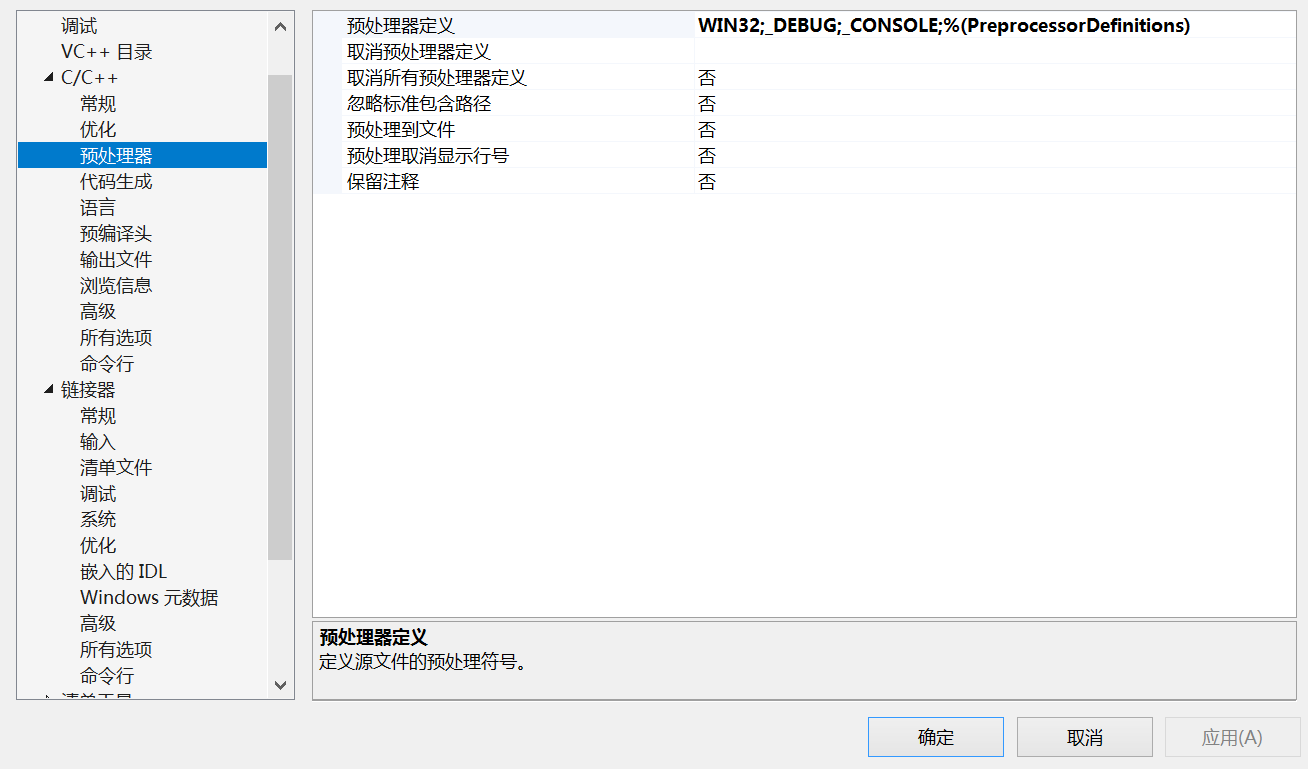
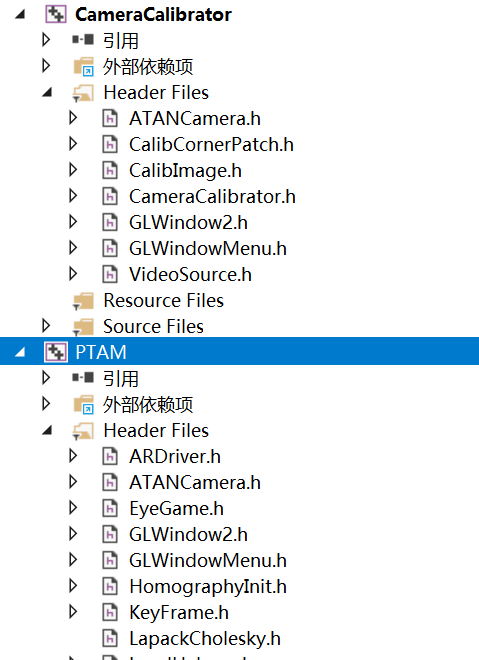
4.1 软件平台简介 17
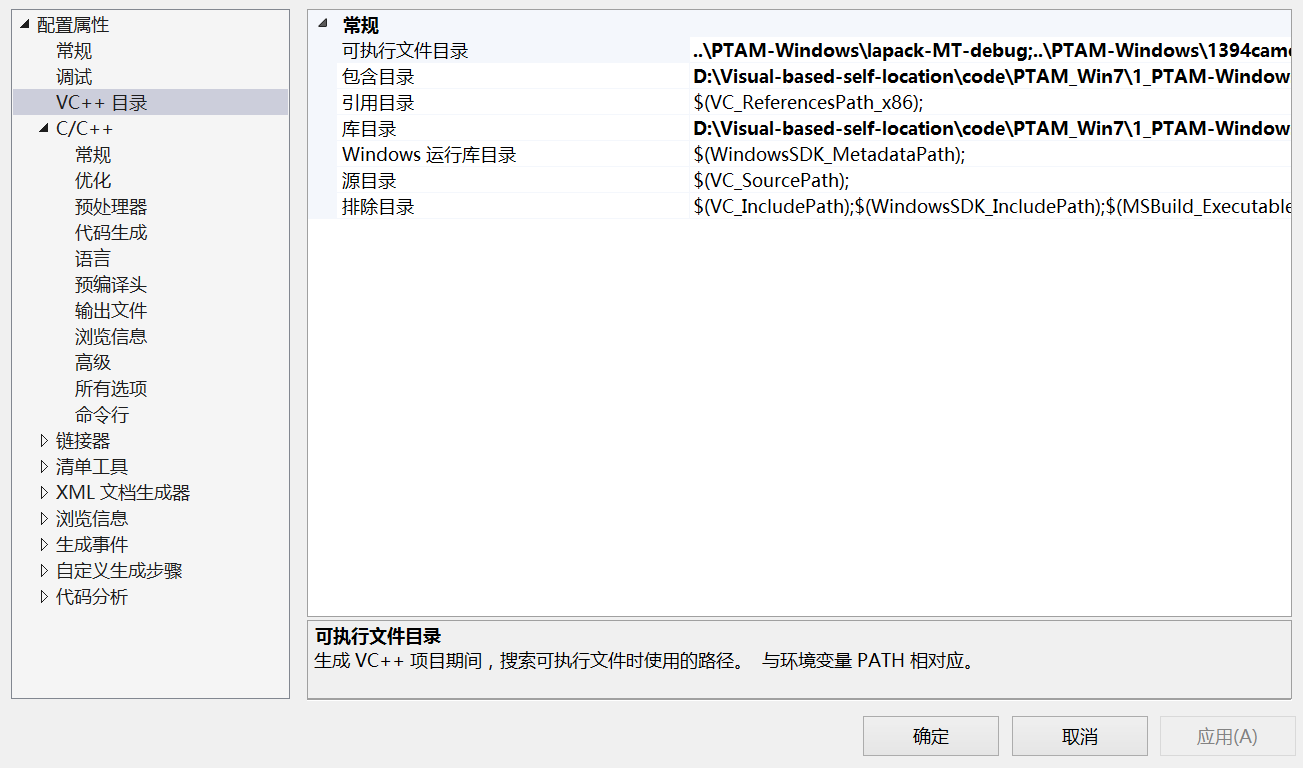
4.2 环境配置与调试 17
4.3 摄像机的标定 22
4.4 系统功能介绍与展示 24
4.5 本章小结 25
第5章 结论与展望 26
参考文献 27
致 谢 28
第1章 绪论
1.1 研究背景、目的与意义
随着人类科技的不断发展,社会的信息化和智能化程度越来越高,智能机器人在社会中的应用一样随之持续增多,并且需求也愈加广泛。作为当下集计算机、信息、传感器等高新技术科技于一身的宠儿,移动机器人的综合研究能力代表着一个国家的科技研发与生产实力,故一直备受世界各国的关注与重视。它与人类文明的发展已逐渐密不可分。
而本世纪以来,伴随机器人应用场合的多样化,环境中的未知因素也不断复杂化,想要让机器人能成功完成预想的功能,就必须让其具备自主导航的软硬件条件。智能机器人之所以能够被人们称为智能,是因为它有着发达的“大脑”,即强大的中央处理系统,并依靠自己独特的内外部信息传感器,来实现自己对周围环境的多种元素的探知,并有像一个能自我控制的“生物”一样行动的能力。这样的优势让它在如太空、海底和矿井等危险环境下替代人类探索到更多信息,或是在重工业、化学品等高危生产车间内进行繁杂重复的自动搬运工作,又或者在如医疗、教育、导游等方向上发挥智能机器人知识储备丰富、操作精密等优势,可以说在许多应用方向上都是很有发展潜力的[1]。而关于这种智能真正意义上的实现,SLAM技术则一直是研究的热点和难点问题。
SLAM技术作为当前移动机器人定位技术中最主流的研究方向之一,是由Randall Smith和Peter Cheseseman在1988年最早提出的。在他们的这篇论文中,以移动机器人的运动算法和自身携带的传感器测量数据为基础,分别建立了移动机器人的运动模型和观测模型,并使用结合概率学贝叶斯理论的滤波器,成功地在未知环境中对轮式机器人的运动状态进行了实时估算。Leonard和Durrant-Whyte还指出,移动机器人自主导航的过程可以总结为以下三个最基本且关键的问题,即“我现在在哪?”、“我周围的环境是怎样的?”以及“我怎么样才能到达目标位置?”,这三个问题本质上就是概括了同步定位和地图创建、障碍物的识别和规避,以及自主导航路线规划的问题[2]。而后两者能否被正确解决正是直接取决于SLAM问题的处理质量,故说它是提高移动机器人智能化水平的关键性与基础性问题是很客观的。
本文主要研究通过单摄像头实现的移动机器人SLAM技术,因为视觉SLAM相比传统的激光和声纳SLAM具有通用性和性价比较高、采集信息量丰富、测量范围较广和便于识别目标特征等优点,且与双目、深度及全景摄像机相比单目摄像机具有结构简单、造价低廉的优点,便于我们在其原理和实施方法等方面进行深入探寻。
1.2 SLAM国内外研究状况概述
1.2.1 国内研究概况
我国在改革开放后的几十年来,在科学技术方面的进步可以说是十分迅速的,但在机器人研究领域,受制于工业基础设施与研究时间等方面的先天不足,机器人的各方面技术同国外发达国家的差距还比较大,目前处于学习和追赶国外先进技术的阶段。国内SLAM技术在近十年左右才比较集中地出现,相关的成果主要由国内几所重点院校及科研所摘得,如清华大学,国防科学技术大学,上海交通大学,哈尔滨工业大学,中南大学及中国科学院研究所等,总体来说研究的学者和机构并不多,特别是在基于单摄像头的SLAM方向上,大都是对国外技术的改进,而没有独创的成果,在理论知识的积累方面有所不足,因此想要取得较大的提升也较为困难,需要继续对国外技术进行学习并坚持自主研究才能不断发展进步。
1.2.2 国外研究概况
而国外由于在这方面起步较早,在机器人的研究和设计能力上有着显著的优势。自20世纪60年代Nilsson等人将机器人自主导航与人工智能技术相结合以来,移动机器人的定位和建图技术就开始被广大的工程师和学者们所重视。而早期的技术受制于理论知识尚不完善与传感器水平的不足,并不能很好的测试和应用。这时只能事先录入完整的运动环境信息,又或者机器人直接按确定的轨迹来运动,显然这种状态下同步和探知未知环境是无法做到的,这毫无疑问是不能达到实际应用的需求的。因此,在之后的发展中定位和建图这两项技术才慢慢结合了起来,虽然在这段时间里由于受技术的限制,进展其实是十分缓慢的。直到80年代末期,由Peter Cheeseman和Jim Crowle等年轻的研究者团队第一次提出使用概率状态来估计机器人定位和地图创建的方法,将运动时的环境噪声和位置几何关系用概率分布来模拟,并得到了较为精确的预估值。至此,该方法也开始成为机器人定位技术中的主流,同时,同步定位和地图构建也慢慢被科学家们结合使用来解决这一问题,此后SLAM技术的理论基础也不断被充实和完善。到1995年,Durrant-Whyte等人在此研究基础上首次对SLAM理论框架进行了系统性的论述,标志着这一技术的成熟。
而近三十年来,由于激光和声纳技术的完善,国外在SLAM问题上对其的应用也是水到渠成,此外,一些新型的、功能更完善的传感器也较多地被集成到机器人的系统中,如指南针、GPS、红外遥控等等,这些传感器也在不同的环境条件下较为理想地发挥了作用。而如今,越来越多的设备,如手机、笔记本电脑和智能平板之类的电子设备都携带了视觉传感器,一般来说即单目摄像头,故对其感兴趣的工程师和学者都在研究这种基于视觉的SLAM能否改变现有的成熟体系,因为视觉传感器占用空间少,重量小,测量范围较广,采集信息量丰富,且性价比较高,安装方便,这些优势都对其研究有很大的推进作用。
表1.1 不同传感器的优缺点比较
传感器种类 | 优点 | 缺点 |
激光 | 精确,快速,算法简单 | 设备笨重、昂贵、功耗大 |
声纳 | 适用于固液体环境、距离远 | 精确度较低 |
单目视觉 | 安装方便、成本低廉 | 无法得到视觉深度信息 |
双目视觉 | 效果立体、视觉深度可测 | 安装麻烦、深度量程固定 |
全景视觉 | 测量范围广、信息量丰富 | 畸变较严重 |
1.3 本文的内容与架构安排
1.3.1 主要研究内容
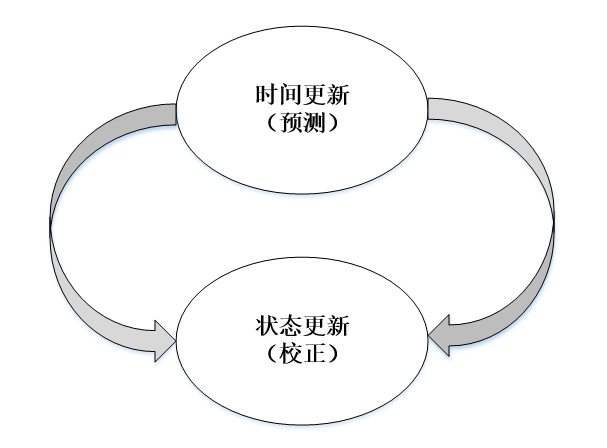
本文的主要内容为研究基于单摄像头的SLAM技术相关问题。机器人的同步定位与地图构建实际上就是通过算法对其运动进行有效预估的问题,并能准确识别传感器获取的内外部信息(这里主要指由摄像机获取的外部信息),计算机器人在某个时间节点的位置,建立该时刻的地图,再通过不断获得的数据对这张地图和定位进行同步修改,以达到预期目的。这是一种较为前沿和偏重实践的技术,因此本文的主要目的为学习研究现有的基于单目摄像机的SLAM技术,并能提出一定的改进措施。主要有以下内容:
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: