城市环境下树木的树冠变化和变化不确定性的量化研究外文翻译资料
2022-10-27 15:31:38

英语原文共 15 页,剩余内容已隐藏,支付完成后下载完整资料
城市环境下树木的树冠变化和变化不确定性的量化研究
摘要
地方当局需要一份关于城市绿色资源状态的详细报告,以确定城市树木的益处,并确定对城市林业的干预措施。本研究采用双时态遥感数据监测随时间变化的城市树木。在城市地区高分辨率图像中,提出了一种模糊识别树冠模糊性的方法。该方法在一个高斯函数的迭代拟合后,将其识别为一个高斯函数,对其进行二次匹配。逐渐的和突然的变化都被获得,此外它也作为一种检索对象的不确定度的度量。该方法允许一个清晰或模糊过程变化的双重处理。这是荷兰两个住宅小区采用一套Quick Bird卫星航拍的图像。结果表明,所提出的方法是信息的对象级的变化,识别的模糊特征和混合像素的树冠的图像,它提供了有用的信息来结束用户变化的不确定性。
1.引言
最近的研究表明,城市树木库存数据是十分不完整和过时的。由于城市生态系统的复杂性,景观动态,树种的多样性和私人财产访问的约束性,传统的地面调查往往是低效的信息源。极高分辨率的图像分析可以帮助更新这些数据库和监测树木的存在状态。一般情况下,遥感城市树木的库存需要实施能通知发生突然和渐进变化的检测方法。突变是一棵树的种植、砍伐或死亡,而逐渐变化是树冠直径和树高的年增长率。
图像分析方法如变化向量分析、图像回归和多元变化检测识别图像数据水平的变化。双时态变化检测,主要是实现使用基于像素的不同日期获得的两图像分类的结果比较。如果使用传统的清晰的分类方法,其中每个像素被分配到一个单一的土地覆盖类,逐渐的改变将被忽视,因为只有像素改变或没有改变状态报告。此外,清晰分类方法的变化观察研究不能说明空间支持的单个像素的土地覆盖现状的组合反射率,同时也不能忽视的点扩散函数的影响。
模糊逻辑方法可以应用于遥感图像,使土地覆盖在时间空间上的逐步变化包容一致。到目前为止,一定数量的研究已经采用这种方法来研究自然和综合环境的变化,如森林、湿地和生态交错带。虽然树冠遥感通常被视为对象,有人可能会说,一个模糊的方法是适当的树冠变化检测的方法,因为它解决了混合像元的影响和植被逐渐变化的问题。
根据树的结构和边界像素的图像中树冠的组合反射率是树冠层的综合贡献的结果,在树冠的阴影和下层材料。在本文中,我们提出了一种统计树冠模糊性的变化的检测方法,可以测量树冠对象的突然和渐进的变化,并报告在像素级变化中的不确定性。该方法集成了从不同的软分类获得的模糊隶属的图像,并在这种方式中,可容纳在空间分辨率或动态范围的输入图像的差异。通过集成模糊和清晰的方法,我们的目标是满足这些用户对于树木库存和报告的离散变化需求,但谁仍然能从变化不确定度的估计中获利。该方法是构想能应用在从城市地区获得的叶片条件的高分辨率多光谱影像我们展示了它的实现和性能在一个变化的监测方案在城市附近,荷兰的代尔夫特,,利用快鸟和航拍图像。第2节提供了一个大致的关于变化检测方法的描述,而第3节演示了它在选定的研究地点的实施。
2.变化检测方法
2.1通用工作流程
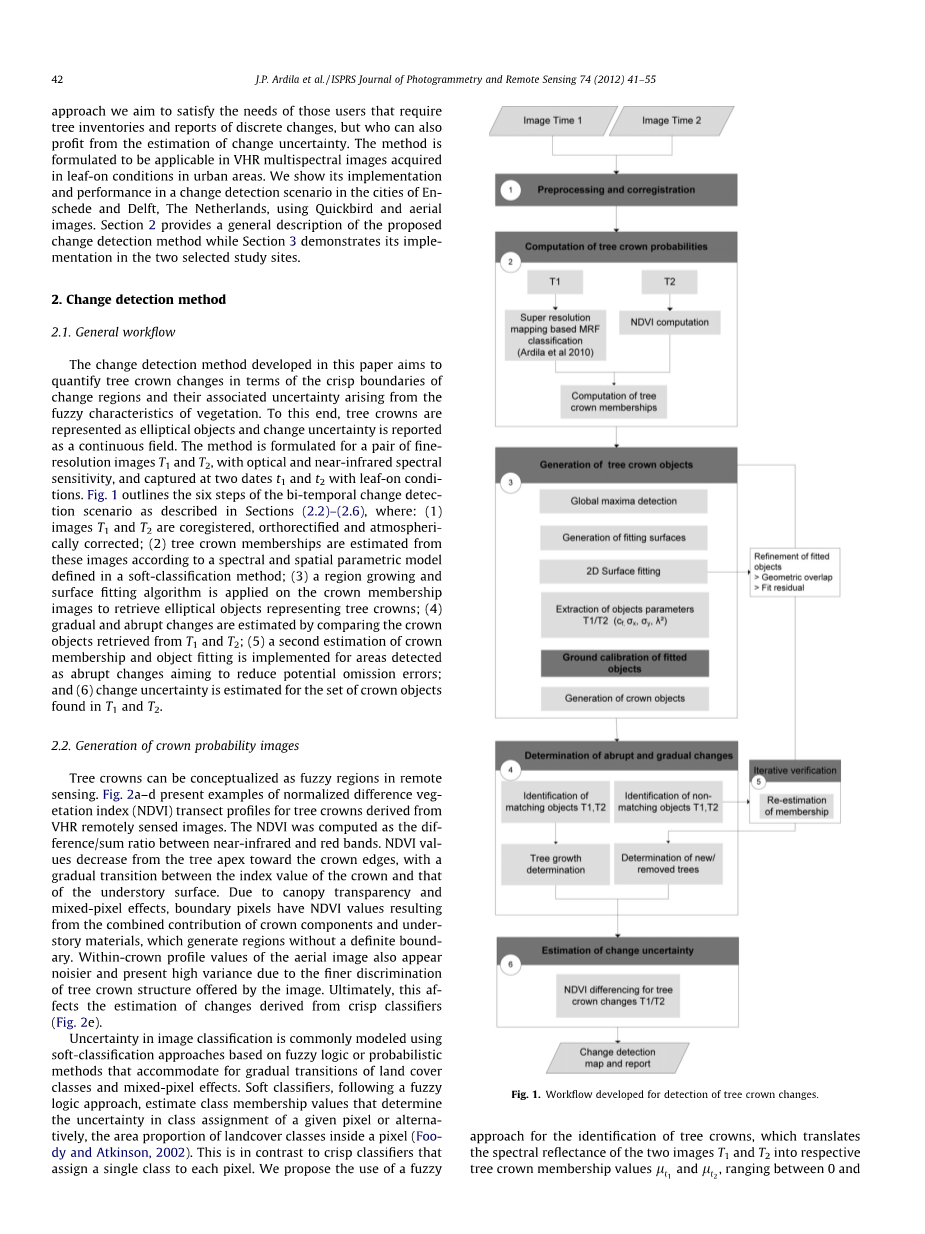
本文开发的变化检测方法的目的是根据树冠区域变化的边界和从植被的模糊特征产生的相关不确定性来量化树冠变化。为此,树冠被表示为椭圆形的对象,变化的不确定性被报告为一个连续的字段。该方法是用光学的、近红外光谱的灵敏度的高分辨率图像T1和T2来阐述,并在片叶子条件下捕获T1和T2两个日期。图标1概述了图(2.2)–(2.6)中所描述的双时态变化检测方案的六个步骤,其中:
(1) 图像T1和T2是校准过的,正射校正大气;
(2)树冠全体成员是从这些根据光谱和空间参数模型中定义的软分类方法的来的图片来估计的;
(3)一个区域生长和曲面拟合算法应用于树冠全体的图像检索椭圆形的对象来代表树冠;
(4)渐变和突变的变化是通过比较冠对象从T1和T2反演估计得到的;
(5)一个对于树冠全体和对象的拟合实现突然变化区域的检测的二次估计,旨在减少潜在遗漏错误;
(6)变化的不确定性是树冠对象在T1和T2发现集的估计。
2.2树冠概率图像的生成
树冠可以概念化为遥感模糊区域。图2a-d提出归一化植被指数(NDVI)来自VHR断面型材的遥感图像。NDVI作为近红外和红外波段之间的差异比率来计算。随着从树冠的指示值到林下表面之间逐渐过渡,NDVI的值从树顶朝冠的边缘降低。由于冠层的透明度和混合像元的影响,由树冠部分和林下表面部分共同形成的边界像素的NDVI值从,产生区域没有明确的边界。航拍图像冠值越高的变异是由于更高的歧视树冠结构的图像提供。最终,这影响了对清晰分类变化的估计(图2e)。图像分类中的不确定性是常用的软分类方法的基础上模糊逻辑或概率的方法,可供逐步过渡的土地覆盖类别和混合像元的影响。软分类,紧接着模糊逻辑方法,估计类的隶属度值,确定不确定性的类分配一个给定像素或替代,土地覆盖类内像素的面积比例(Foo Dy和阿特金森,2002)。这是清晰的分类,分配一个单一的类到每个像素。我们提出了一种树冠识别模糊方法的使用,将两图像的T1和T2的光谱反射率为各自的树冠的隶属度值LT1和LT2介于0和1。请注意,一些模糊分类方法可以用于此目的,根据所使用的图像,如光谱和空间分辨率的具体特点。
2.3.树冠对象的生成
利用数学模型对光学图像中的树冠反射特征进行近似计算。模板匹配是用于树检测和划分主要针叶林。树木被建模,例如,使用旋转椭圆的一般方程。在这项工作中的树冠对象提取的基本假设是,在我的年龄树可以近似为二维高斯拟合的冠成员。由于树冠产生斑点状的局部辐射极大值附近的树冠的中心区域的图像特征这样的假设是合理的,并逐渐减少向冠边缘(图3)。如第2.3.3所示,拟合优度的计算(V2),有助于识别个体的斑点,不完全与高斯表面和单独的组的联锁高斯斑点。
在图像空间中,以一个中心位置、2个半轴和一个旋转角度来定义单个的树冠。要提取冠的对象,一个树冠的参数化的表面模型,安装在本地的隶属度图像。曲面拟合包括找到参数值定义的函数最大化的协议的观测数据。这项研究包括:(1)冠隶属度图像中采样区域的定义;(2)所产生的区域高斯模型拟合;(3)重叠对象评估;及(4)模型参数的地面标定。
2.4.迭代验证
在图像分类中和变化检测研究传播的错误是很常见的(Foody,2010),产生的使用和遗漏错误不能为真正的地面上的变化提供信息。为了抵消这种影响,树冠成员会和突变区域反复验证。因此,对于一个T2冠对象的缺少,树冠成员会在T1对象对应程度进行验证。其次,如果重新计算成员表示了一个树冠的存在,第二辐射拟合用于恢复丢失的对象。如果成员标准仍然支持突然的树冠变化,曲面拟合是不必要的并且这个区域被标记为改变区(见图1)。这种迭代验证适用于T1和T2中对象消失,反之亦然。
3.变化检测实验
3.1.研究地点和数据
要实施的变化检测方法,并评估其有效性,我们选定的2个测试地点在荷兰的住宅区。第一个位于恩斯赫德市,有6公顷,第二个区域是11.8公顷的区域代尔夫特中心。这两个网站的一组由两QuickBird影像(QB)的场景和两个DKLN Ultracam航拍图像是可用的。在本文的其余图像中指出,根据他们不同日期分别获得的QuickBird影像QB06和QB03和DKLN09和DKLN08恩斯赫德和代尔夫特的航拍照片。数据集的图像特征,在相机传感器1和技术细节上表所示可以在Scholz和Gruber发现(2009)和DKLN(2011)中。
在这项研究中,树木被认为是有一个至少直径3厘米和一个高度大于1.5米高有明确的树冠和一个单一的主茎的木本植物。图6和7显示了在研究中使用的图像集。在恩斯赫德曾在公共和私人土地种植约150棵树。观察到很大的多样性,在该地区的支持表面(例如,裸露的地面,草地,密封的地面,鹅卵石),物种和树种植模式(例如,孤立的,集群的,线性的)。在代尔夫特约有350棵树木和他们建设的大量直线的水道,街道和私家花园。还有在公园里种植的大约30棵树(图7中的网格细胞A2和A3)。在该位置上观察到的最大冠直径为12米。超过90%的树木落叶。在代尔夫特树木整体之间更聚集,树干的平均距离为8.45米,而在恩斯赫德是9.36米,比较图像的采集日期得到他们是在叶的条件下获得的,然而,在代尔夫特,在2003年图像采集的时候一些树还是有显而易见的阴影。
在25厘米的分辨率下,所有的树冠参考多边形层是2003,2006,2008和2009的VHR图像的视觉解释所记录的。在现场测量了10棵树的位置和平均树冠直径,以校正椭圆参数。参考树冠如图6和7所示。为了验证,一个参考层的变化是由每个研究日期的参考层的交叉叠加构成。
3.2.图像的预处理
VHR航空影像利用图像分配器根据XP的ultracam相机的特点进行地形校正和辐射校准。QuickBird遥感图像与航拍图像在恩斯赫德和代尔夫特的配准分别采用均方根误差是0.81米和0.18米的多项式模型。由于大气校正对直接进行比较变化是重要的(2.6节),DN值转换为反射率值与辐射校正和大气校正。使用黑暗部分减影矫正,主要去除了在较短的波长气溶胶散射效应,提高了植被指数估算(Myneni和Asrar,1994; Kaufman 和 Tanre,1992)。
3.3.概率图像的估计
为了解决辐射图像性能和空间上的差异(表1),我们使用了两种不同的方法来估计QB影像和航拍图像的树冠隶属度值。认识到识别单一的树冠QuickBird多光谱影像的空间分辨率的有限,我们实现了一个超高分辨率的映射(SRM)基于马尔可夫随机领域分类(MRF)在0.6米分辨率下产生树冠软分类。树木检测的SRM,由安迪拉等人构建的(2011),接着是一个考虑到图像像素空间和光谱特征的分配给一棵树冠类的贝叶斯前后分类方法。光谱参数的均值和方差,是来自一个训练集的四类:树冠、草地、灌木和密封抵免,全色和多光谱各试验现场。分别嵌入在一个先验模型,有利于空间聚集的像素在相同的主题类的先验模型。随着安迪拉等人(2011)报告的树冠清晰的成员,我们扩展了获得模糊类成员的方法。
Ultracam,25厘米空间分辨率的航空正射影像,提供足够的细节来区分单独的树冠出现的模糊区域。然而,在这种情况下,面临的挑战是解决内冠光谱的变化和相应的树冠在图像的几个光谱类。这个大的光谱变异源于:(1)在空间细节的增加(Woodcock和Strahler,1987)(2)在不同光照条件下的拍摄现场(3)的相机传感器的大辐射灵敏度(16)和(4)在该地区发现的树种多样性。事实上,从光谱分类派生类成员的值,如最大似然,是高度敏感的抽样设计和类定义。
4.实验结果与精度评价
树冠的隶属度图像,得到的软分类程序,在3.3节概述中的这两个测试地点。图9a和b显示的是恩斯赫德成员的图片。对QB06树冠成员不断产生的高值在树冠的位置(黑色的轮廓)。非常小的树木的地区(即,树冠直径小于4米)产生的概率低;如图9a网格细胞:A12,B12,C12和D12。对DKLN09树木成员图像产生高值的地区包括较小的树木,所有的树木;如图9b网格细胞:A12,B12,C12和D12。其他植被的表面,但是有同样高的隶属度值,如草地和灌木;如图9b网格细胞D6和E6。 在以代尔夫特树冠成员为研究数据的参考数据正确对应一致的计算。我们观察到,然而,由于较低的隶属度值的qb03早期获取日期QB03(见3.1节)。基于树木的成员图片和以下的概述2.3节的QB06和共111 个树冠对象和192个DKLN09的树木对象最初在恩斯赫德。在树木成员的地区没有相应的迭代验证对象共有115和195的对象被分别视为QB06和DKLN09,如图10a和b的整体表现。总的来说,树冠对象显示在引用数据集的树冠的一个很好的协议;如图10a网格细胞:E11,G2,H6,H7和I8;和图10b网格细胞:B11,C4,C12,E11,H7和I8。在QB06,几个小的树冠被遗漏掉(如图10a网格单元:A12,B12,C12和I9),而在DKLN09树冠进行更好的确定与一些在私人花园的检测(如图10b网格细胞:D5和D8)。注意,在草原地区的高值没有触发报警因为它们很大程度上偏离了用于拟合的曲面模型(图10b网格单元:D6和E6)。
同样,在代尔夫特DKLN08一共299个树冠对象QB03和413初步确定。在地区没有相应的迭代验证对象共有308和414的对象被确定为QB03 和DKLN08分别为QB03几种树图11a和b显示了由于图像的早期获得日期(网格单元:A5、A6和B1)。代尔夫特允许测试在相邻树木的区域变化检测方法(即沿水通道)和树簇。在线性模式的树木经过两用数据一致认定,在具有强烈的互锁檐树实例的集合。在网格中的细胞A2、A3显示树的组,对应一组城市公园中种植的树木,B2和B3。虽然冠物同等数量均未检出,椭圆的正确鉴定的空间范围的树木在集团对于日期的空间范围。 树冠识别精度见表2。在恩斯赫德位点的识别率分别为70%和90%,分别在qb06 dkln09。假阳性的错误(类型),在30%的顺序为2009年,而假阴性率较低。在代尔夫特网站的识别率上,91%和96%,分别为qb03 dkln08。在代尔夫特网站的错误均降低,与假阳性率均在9
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[153325],资料为PDF文档或Word文档,PDF文档可免费转换为Word



