基于上肢表面肌电信号的虚拟人机交互系统设计毕业论文
2020-02-17 21:59:27
摘 要
传统的交互方式往往只考虑机器的特性,而忽略了人的因素,造成了人机通信的瓶颈。现在越来越多的人开始关注人机交互领域,越来越多的研究者将“人”这个因素考虑在内,让人机交互更加的自然、方便,更加具有人情味。比如基于表面肌电信号的人机交互,基于脑电波的人机交互等。本次设计就是采用基于上肢表面肌电信号的人机交互方式,受试者做屈臂和伸臂运动,系统通过肌电信号采集仪(Trigno Wireless EMG System)得到肱二头肌和肱三头肌的肌电信号,对其预处理后,利用Hill肌肉模型预测出肌肉力,并根据肌肉力的大小,控制虚拟飞机执行左右偏航动作。本文的主要工作包括:
- 在Visual Studio上搭建一个虚拟交互系统,基于OpenGL绘制3D场景,包括天空、草原等,并导入虚拟飞机的3D模型,首先实现用键盘控制飞机的左右偏航飞行;
- 学习了Hill肌肉模型,了解了该模型的原理,并能够利用采集到的肌电信号预测出肌肉力的大小;
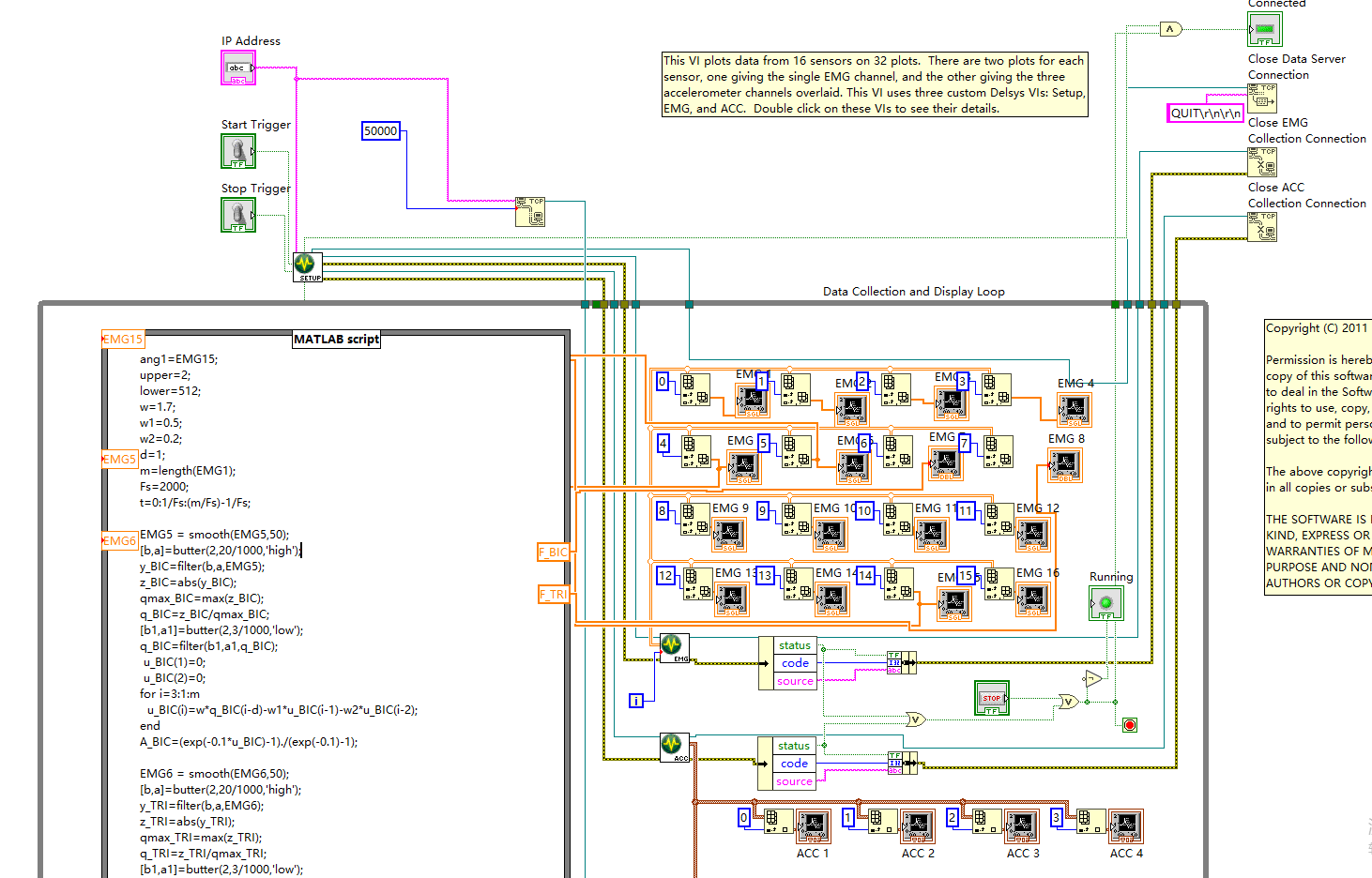
- 在Labview中绘制前面板,将肌电信号采集仪采集的原始肌电信号和关节角显示出来,并在程序框图中添加MATLAB节点,对原始肌电信号进行降采样、带通滤波、整流等处理,通过Hill肌肉模型预测出肌肉力;
- 以虚拟交互系统做服务器端,Labview做客户端,实现两者之间的TCP通信,以肱三头肌的肌肉力作为判断依据,选取合适的阈值,将Labview判断出的标志位传给虚拟交互系统,以此来控制飞机的左右偏航。
最终实现了用上肢表面肌电信号控制虚拟飞机,完成了人机交互,并给出所测肌肉的肌肉力,在康复医疗领域有很大的潜力。
关键字:上肢表面肌电信号;虚拟环境;人机交互;Hill肌肉模型;肌肉力
Abstract
The traditional way of interaction often only considers the characteristics of the machine, but ignores the human factors and causes the bottleneck of human-computer communication. Now more and more people are paying attention to the field of human-computer interaction. More and more researchers take the factor of "human" into consideration, making human-computer interaction more natural, convenient and more human. For example, human-computer interaction based on surface EMG signals, human-computer interaction based on brain waves, and the like. This design is based on the human-computer interaction of the upper limb surface EMG signal. The subject performs the flexion and extension arm movements. The system obtains the biceps and triceps through the Trigno Wireless EMG System. The EMG signal, after pre-treatment, uses the Hill muscle model to predict muscle strength, and according to the size of the muscle force, controls the virtual aircraft to perform left and right yaw motion. The main work of this paper includes:
(1) Build a virtual interactive system on Visual Studio, draw 3D scenes based on OpenGL, including sky, grassland, etc., and import the 3D model of the virtual aircraft, firstly realize the left and right yaw flight of the aircraft with the keyboard;
(2) Learning the Hill muscle model, understanding the principle of the model, and using the acquired EMG signals to predict the size of the muscle force;
(3) Draw the front panel in Labview, display the original EMG signal and joint angle collected by the EMG signal acquisition instrument, and add MATLAB node in the block diagram to downsample and bandpass the original EMG signal. Rectification and other treatments, predicting muscle strength through the Hill muscle model;
(4)The virtual interactive system is used as the server side, and Labview is used as the client to realize the TCP communication between the two. The muscle force of the triceps is used as the judgment basis, and the appropriate threshold is selected to transmit the flag position determined by Labview to the virtual interaction. The system is used to control the left and right yaw of the aircraft.
Finally, the virtual aircraft is controlled by the upper limb surface EMG signal, the human-computer interaction is completed, and the muscle strength of the measured muscle is given, which has great potential in the field of rehabilitation medical treatment.
Keyword:upper limb surface EMG; virtual environment; human-machine interaction; Hill muscle model; muscle strength
目录
摘要 I
Abstract II
第1章 绪论 1
1.1课题研究背景及意义 1
1.2基于表面肌电信号人机交互的国内外研究现状 1
1.3本文主要研究内容 1
第2章 基于Hill模型的肌肉力预测 3
2.1肌电信号的采集与预处理 3
2.2肌肉激活度的测量 4
2.3 Hill肌肉模型结构 4
2.4基于Hill肌肉模型的肌肉力计算 5
第3章虚拟交互系统的设计及控制实现 7
3.1虚拟交互系统的搭建 7
3.1.1绘制场景 8
3.1.2导入飞机模型 8
3.2肌电信号在Labview中的预处理 12
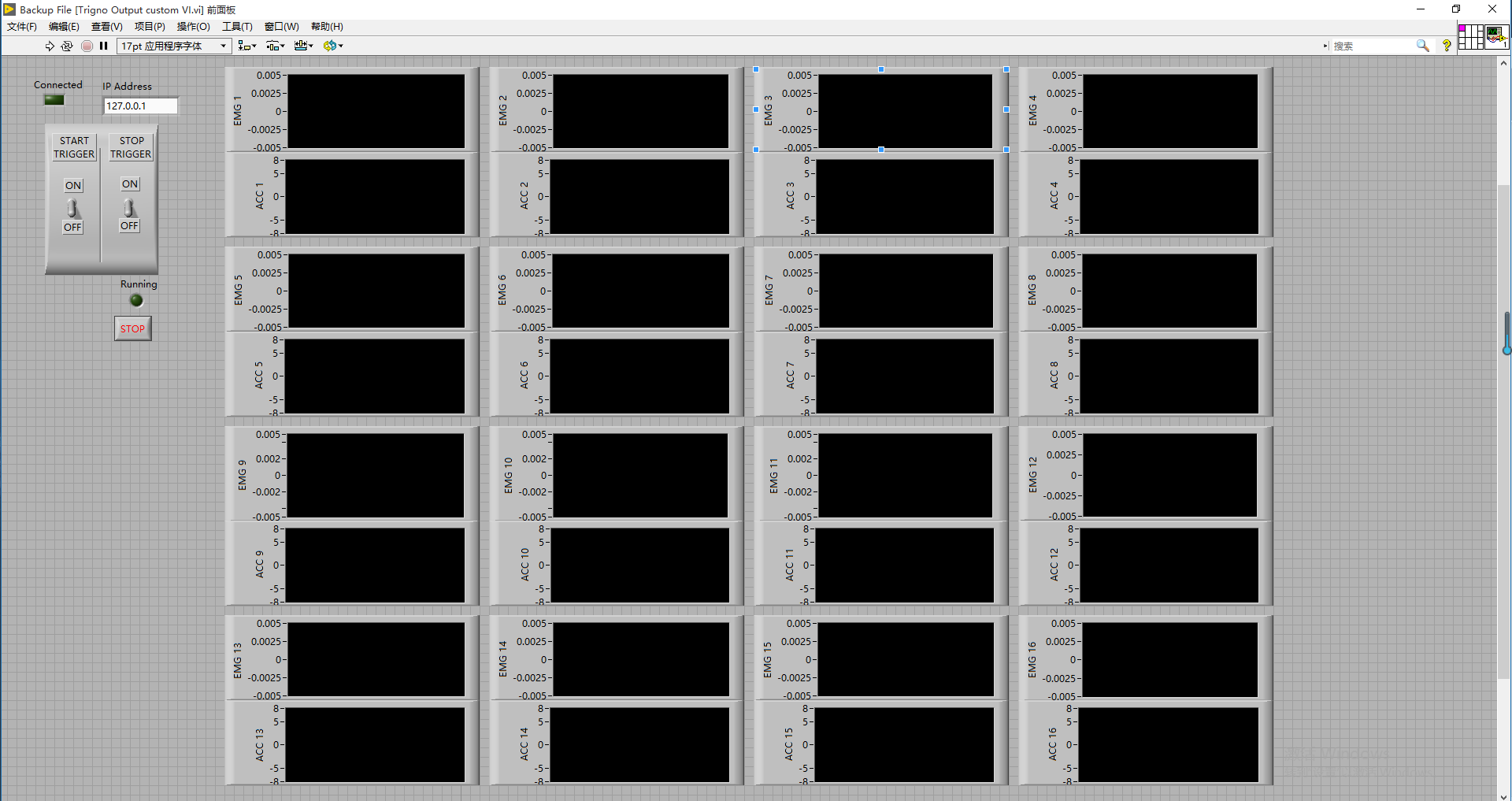
3.2.1在Labview中绘制前面板 12
3.2.2肌电信号预处理 13
3.3 Labview和Visual studio的TCP通信 14
3.3.1TCP通信基本原理 14
3.3.2Labview和Visual studio的TCP通信 15
第4章实验及结果分析 17
4.1实验对象和实验环境 17
4.2实验过程 17
4.3实验结果分析 17
第5章总结与展望 21
5.1全文工作总结 21
5.2未来工作展望 21
致谢 23
参考文献 24
第1章 绪论
1.1课题研究背景及意义
随着信息时代的到来,计算机、网络、通信等技术得到显著的进步,传统的交互方式已成为人机通信过程中的瓶颈,键盘、鼠标等交互设备不足以满足人们日益增长的人机交互需求,而虚拟现实技术的诞生和发展,使这种限制变得更加明显。因此不断寻找新型有效的交互技术成为了时代的迫切需要。
人体动作包含丰富的信息,因此肌电信号成为人机交互研究的热点。这一形式的开拓,使得人机交互更加方便快捷。而肌电信号是在人体运动过程中,伴随肌肉的收缩和扩张产生的信号,可以反映出肌肉的状态,利用Hill模型更能预测出肌肉力的大小。由于利用模式识别来进行人机交互已经有了足够多的研究,所以本文采用肌肉力来进行人机交互。从某种意义上来说,这是个创新点。基于上肢表面肌电信号的虚拟人机交互系统的设计,不仅仅方便了人机之间的通信,对康复医疗领域来说更是意义重大。预测出的肌肉力可以对康复效果做出客观的判断,又让康复过程变得充满乐趣。
1.2基于表面肌电信号人机交互的国内外研究现状
SEMG 信号发源于作为中枢神经一部分的脊髓中的运动神经元,是电极所接触到的许多运动单元发放的动作电位的总和。它蕴涵了与肌肉中被激发的运动神经元的数目、空间分布以及神经电位传导速度等因素有关的运动信息,而这些因素决定着肌肉的运动模式。这就是根据 SEMG 信号对不同手势动作进行分类的运动生理学基础[1]。与眼电、脑电等信号相比,SEMG信号更容易采集,而且蕴含着丰富的信息;根据表面肌电信号来判断人体的动作意图,随后将其转换成设备的输入,用来控制设备进行相应响应。这种交互方式非常自然,更容易被使用者接受,如今已成为研究热点。如杨宇等[2]通过采集人体前臂的SEMG信号,用模式识别的方法来判断受试者的动作,以此来控制虚拟飞机飞行。Wheeler等[3,4]利用SEMG传感器获取上肢表面肌电信号,以此来控制操纵杆和虚拟按键。
Hill 肌肉三元素模型从宏观上描述了骨骼肌收缩机理,在此基础上发展而得到了多种骨骼肌收缩模型被用来进行肌力计算[5]。吴剑锋[6]等人利用关节角度的函数来描述肌纤维长度。将表面肌电信号结合Hill肌肉模型,可以预测出肌肉力的大小,以此为桥梁来进行人机交互也正在成为人们关注的研究方向。
1.3本文主要研究内容
本文基于OpenGL在Visual Studio上搭建了一个虚拟交互系统,绘制了3D场景,导入飞机模型,并利用TCP可与Labview通信。本系统使用肌电信号采集仪(Trigno Wireless EMG System)采集上肢表面肌电信号,将数据传入Labview中进行处理,可以通过虚拟示波器看到采集到的肌电信号,以及预测出的各肌肉的肌肉力大小。然后根据健康人的肌肉力设置一个阈值,以肌肉力的大小是否超过阈值作为判断依据,将判断的结果传给虚拟交互系统,用来控制虚拟飞机的左右偏航。可以以此来判断患者上肢康复情况。
本论文共四章,每一章节的研究内容为:
第1章介绍了本次毕业设计课题的研究背景及意义,系统地描述了基于表面肌电信号人机交互的国内外研究现状。最后提出本文的主要工作内容。
第2章介绍了Hill模型预测肌肉力的原理。
第3章介绍了在Visual Studio中基于OPenGL搭建虚拟交互系统的过程,以及在Labview中对肌电信号进行预处理的操作,并利用Hill肌肉模型预测出肌肉力,还介绍了如何实现Labview与虚拟系统进行TCP通信。
第4章介绍了实验环境以及实验过程,并对实验结果进行了分析。
第5章对全文的主要工作做出总结,并给出未来有待完善的与本文相关的研究内容。
第2章 基于Hill模型的肌肉力预测
Hill肌肉模型以关节角度和肌肉活动作为输入来估计个体肌肉的力量。首先,我描述了数据收集和预处理过程。第二,我描述了如何从预处理的表面肌电信号中获得肌肉激活度。最后,我详细描述了Hill肌肉模型是如何实现估计肌肉力量的。我们的肌肉力量预测方法的一个简单流程图[7]如图2.1所示。
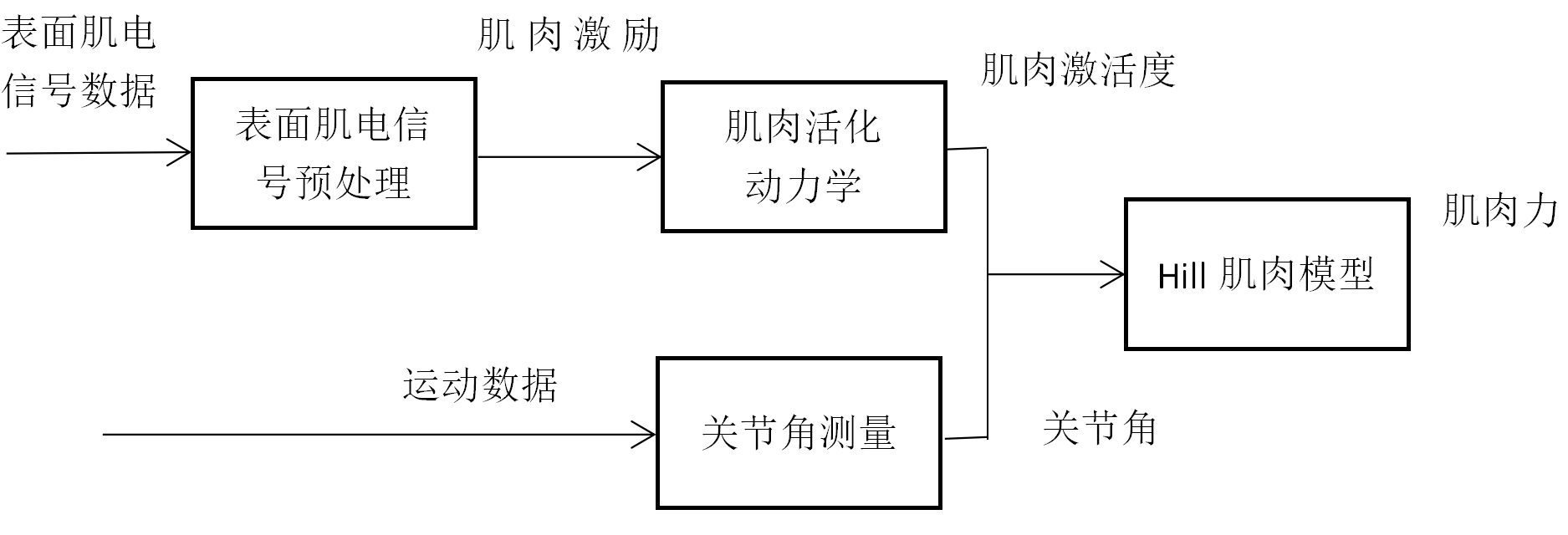
图2.1基于Hill肌肉模型预测肌肉力流程图
肌肉会在肌纤维电刺激脉冲的作用下进行一次收缩,其收缩的幅度大小与动作电位的幅值大小有关,也就是说肌肉的活动状态可以通过肌电信号间接反映出来。同时肌电信号还与肌肉收缩力的大小存在一定的关系。因此,可以通过肌电信号来获得人体运动过程中相关的力学信息。
2.1肌电信号的采集与预处理
我们选取了肱二头肌和肱三头肌作为表面肌电信号采集源。实验对象为5名22岁左右的健康男性,做匀速地屈臂和伸臂运动。采集设备选用Trigno Wireless EMG System表面肌电仪,采集频率为2KHz,数据通过蓝牙传送到计算机上,并利用TCP通信,将数据传送到Labview中,通过虚拟示波器显示出来。在屈肘和伸肘过程中,通过两路通道同时采集两块肌肉的表面肌电信号。
因为单个时间序列的数据点很多,使得后续的算法运行时间过长,所以对信号进行预处理是非常有必要的。常见的预处理手段有加窗、滤波、整流等。采用加窗的方法可以对信号进行降采样处理,使得单个时间序列的数据点大大减少,方便后续操作。由于采集的原始肌电信号中混有噪声,对实验结果会造成影响,所以降采样之后往往会进行滤波,获得比较纯净的表面肌电信号。
利用肌电信号采集仪(Trigno Wireless EMG System)自带的角度传感器可以测得关节角。
2.2肌肉激活度的测量
肌电图(EMG)是一种测量电活动的方法,这种电活动正扩散到肌肉各处,引起肌肉收缩激活。这就导致了肌肉力量的产生。然而,力的形成需要时间生成-它不会立即产生[9]。为此,我们采用了二阶离散线性模型模拟预处理得到的肌肉兴奋神经激活模型,递归滤波器形式:
 , (2-1)
, (2-1)
其中 是t时刻的肌肉激励,
是t时刻的肌肉激励, 是神经激励,
是神经激励, 是肌肉增益,
是肌肉增益, 和
和 是递归系数,
是递归系数, 是肌电信号延时。然后调整神经活动来解释线性或非线性的肌电磁力关系:
是肌电信号延时。然后调整神经活动来解释线性或非线性的肌电磁力关系:
 , (2-2)
, (2-2)
其中是 肌肉激励,是神经激励,
肌肉激励,是神经激励, 是非线性形状因子。
是非线性形状因子。
2.3 Hill肌肉模型结构
在Lieber 和 Friden 等人的研究中,他们发现肌肉的结构会对肌肉收缩力的大小产生影响。对人体肌肉解剖后,仔细观察其微观结构,可以发现上肢骨骼肌主要由羽状肌和多羽状肌构成。
肌纤维的排列结构使得肌肉呈羽毛状,其排列方向与肌肉张力作用方向的夹角称为羽状角。由于羽状角的存在,在运动过程中肌纤维产生的收缩力并不等于肌力,而是肌纤维收缩力在羽状角上的分力。Hill 肌肉模型理论[10]将肌肉抽象为一个由三元素组成的肌肉结构力学模型,这三个元素分别为串联弹性单元(Series-elastic Element, SE),并联弹性单元(Parallel-elastic Element, PE)和主动收缩单元(Contractile Element, CE)。以此模型来反映肌肉的收缩特性。如果把人体的肌肉模型近似为一种弹簧阻尼系统,那么就可以用 Hill 肌肉模型来描述每个肌肉单元的肌肉力。基于Hill 的三元素肌肉模型如图2.2所示。
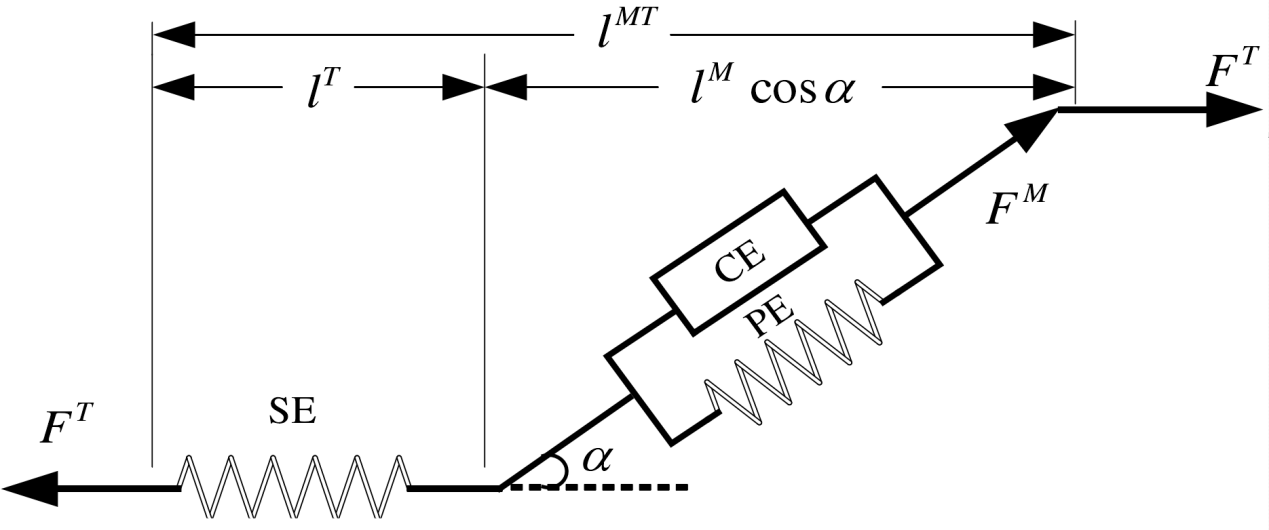
图2.2基于Hill 的三元素肌肉模型
其中, 是肌腱和肌纤维的总长度,
是肌腱和肌纤维的总长度, 是肌纤维的总长度,
是肌纤维的总长度, 表示肌腱的长度,
表示肌腱的长度, 是肌肉纤维束与肌腱的夹角,即羽状角。它们之间满足如下等式:
是肌肉纤维束与肌腱的夹角,即羽状角。它们之间满足如下等式:
 (2-3)
(2-3)
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: