基于UR5多协作机器人的数字孪生系统研究毕业论文
2020-02-17 21:47:04
摘 要
随着信息技术的快速发展,世界各国相继提出“工业4.0”和“中国制造2025”等概念,这标志着一场以“智能制造”为核心的第四次工业革命在国内外席卷开来,传统制造业将在新一代互联网、物联网技术的作用下向智能化迈进,这对提高制造业的国际竞争力,深化产业结构改革具有举足轻重的意义。数字孪生技术是实现“智能制造”的关键技术之一,该技术通过利用物理模型、传感器监控、运行历史记录等数据,完成从现实空间到虚拟数字空间的镜像映射,从而在装备的全生命周期过程反映并控制实体装备的行为。
本文以UR5多协作机器人为研究对象,通过构建数字孪生平台实时监测UR5多协作机器人的运动状态,并显示在网络平台上。本文的研究内容归纳如下:
1.分析数字孪生的原理以及设计需求,确定数字孪生平台的设计方案。
2.研究UR5机器人的物理参数,绘制机器人的三维模型。
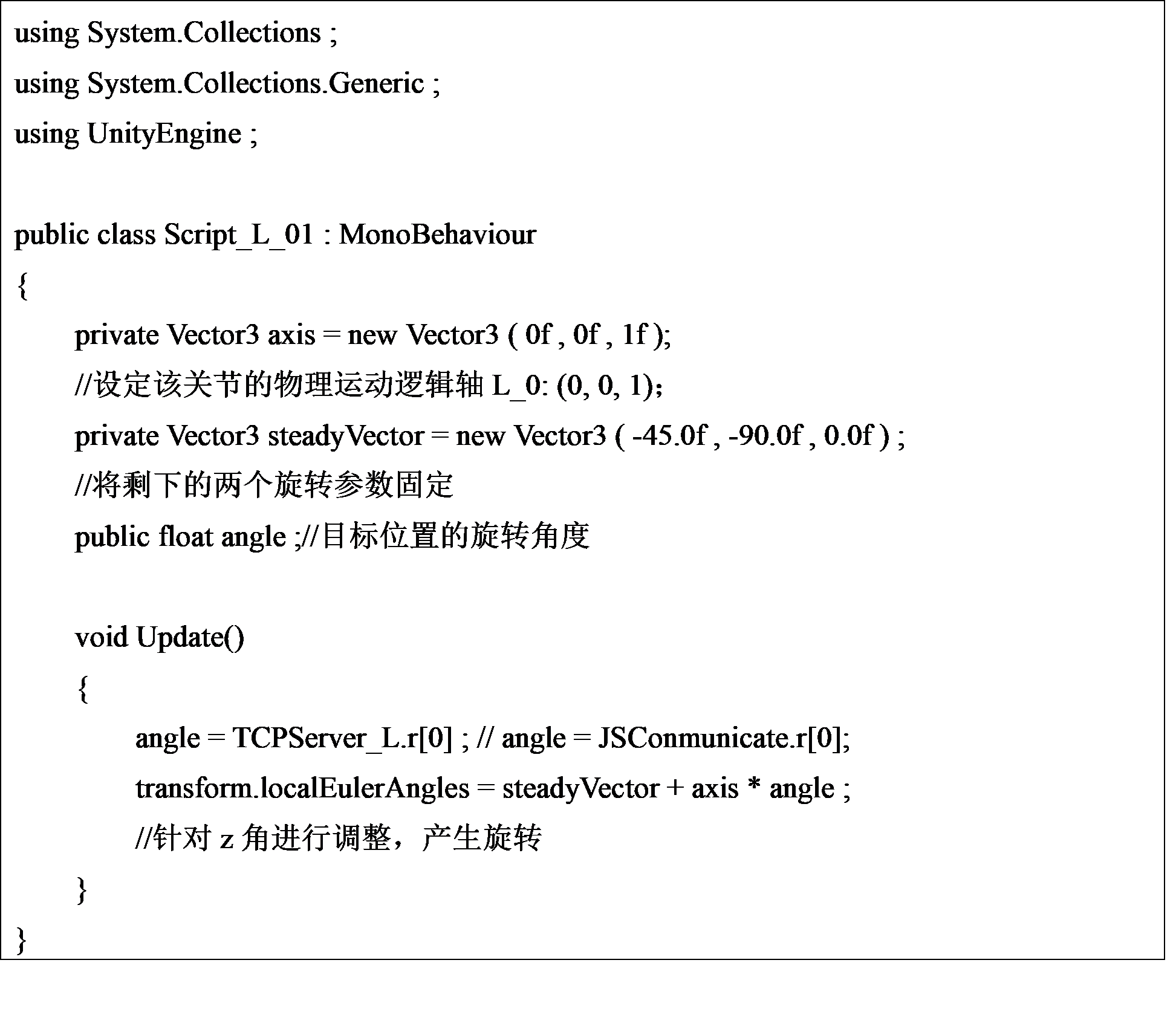
3.以UR5机器人的运动逻辑为基础,编写每一个机械臂关节模型的脚本,规定其运动方式,拟合实际机器人。
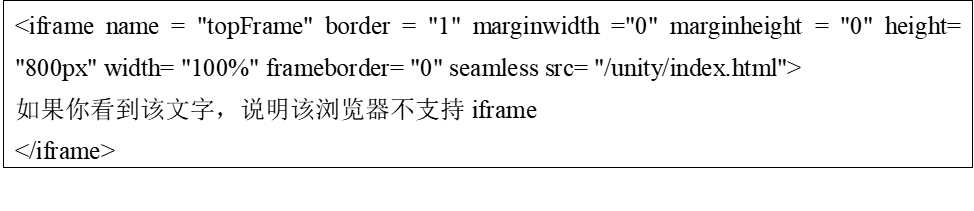
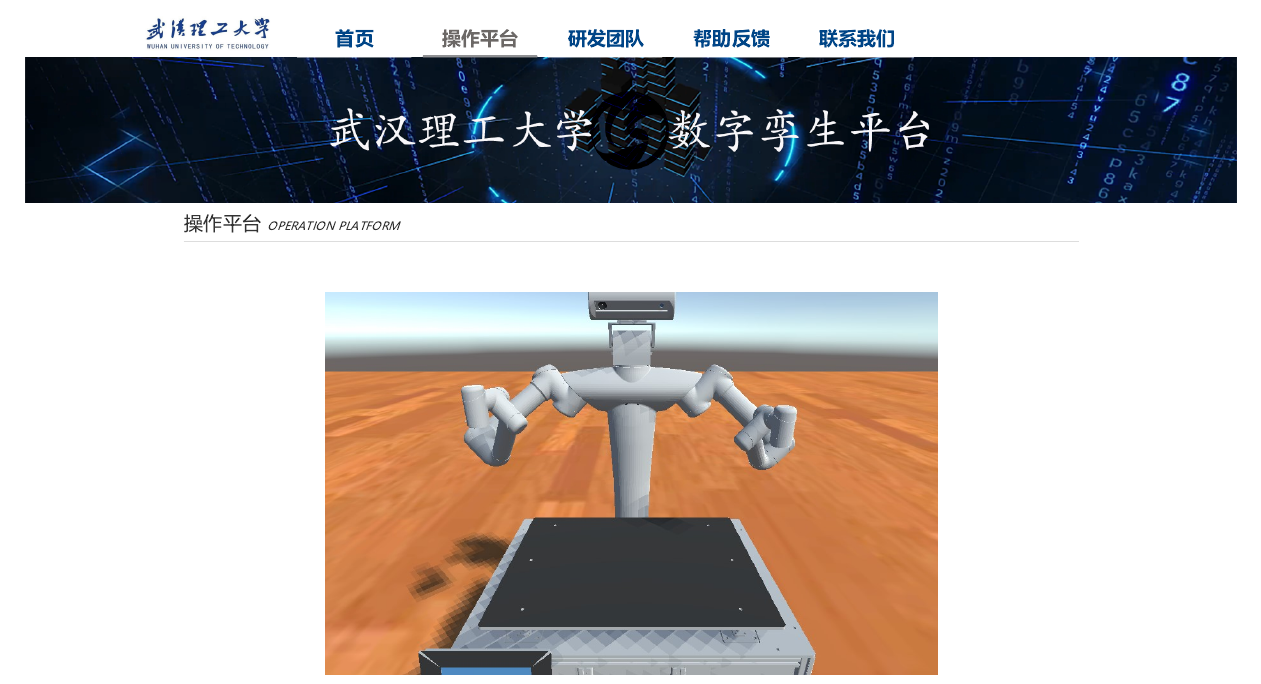
4.构建面向用户实现实时监测机器人数据的网站。
5.载入UR5机器人模型,从而实现以网络平台为载体完成对机器人的实时监控。
6.编写通信协议,实现机器人与网络平台之间的数据传输。
关键词:UR5多协作机器人;数字孪生;Web开发;TCP/IP协议
Abstract
With the rapid development of information technology, countries around the world have put forward some concepts, such as "Industry 4.0" and "Made in China 2025", which marks the fourth industrial revolution centered on "smart manufacturing" at home and abroad. The traditional manufacturing industry will move toward intelligentization under the influence of the new generation of Internet and Internet of Things technologies, which is of great significance for improving the international competitiveness of the manufacturing industry and deepening the industrial structure reform. Digital twinning technology is one of the key technologies to realize "intelligent manufacturing". Through the use of physical models, sensor monitoring, operation history and other data, the technology completes the mirror mapping from the real space to the virtual digital space, thus, the behavior of the physical equipment is reflected and controlled by the digital twin model during the entire life cycle of the equipment.
In this paper, UR5 multi-cooperative robot is taken as the research object. By building a digital twin platform, the motion state of UR5 multi-cooperative robot is monitored in real time and displayed on the network platform. The research contents of this paper are summarized as follows:
1. Analyze the principles of digital twin and design requirements to determine the design of the digital twin platform.
2. Study the physical parameters of the UR5 robot and draw a three-dimensional model of the robot.
3. Based on the motion logic of the UR5 robot, write a script for each joint model of the robot arm, specify its movement mode, and fit the actual robot.
4. Build a website for users to monitor robot data in real time.
5. Load the UR5 robot model to realize real-time monitoring of the robot with the network platform as the carrier.
6. Write a communication protocol to realize data transmission between the robot and the network platform.
Keywords:The UR5 multi-cooperative robot; Digital twin; Web development; TCP/IP protocol
目 录
摘 要 I
Abstract II
第1章 绪论 1
1.1 研究的背景及意义 1
1.2 国内外研究现状 1
1.3 本文的组织结构 2
第2章 数字孪生系统的理论基础 4
2.1 UR5型机器人简介 4
2.2 Web前端开发技术 4
2.2.1 超文本标记语言 4
2.2.2 JavaScript脚本语言 4
2.2.3 Java Servlet 5
2.3 TCP/IP协议 6
2.3.1 TCP/IP的概念 6
2.3.2 TCP的工作机制 7
2.4 相关软件介绍 9
2.4.1 Eclipse 9
2.4.2 Tomcat 9
2.4.3 Unity 9
2.5 本章小结 10
第3章 数字孪生系统的方案设计 11
3.1 数字孪生模型的构建方案 11
3.2 网络平台的构建方案 11
3.3 数据通信的设计方案 11
3.3.1 网络平台与UR5实体机器人的通信 12
3.3.2 网络平台与UR5机器人模型的通信 13
3.4 本章小结 13
第4章 数字孪生系统的构建 14
4.1 数字孪生模型的构建 14
4.2 网络平台的构建 16
4.3 数据通信的实现 18
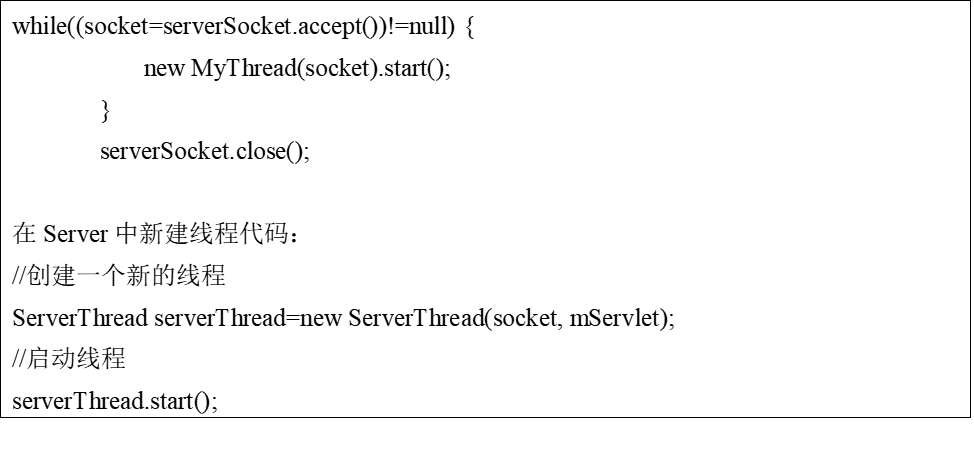
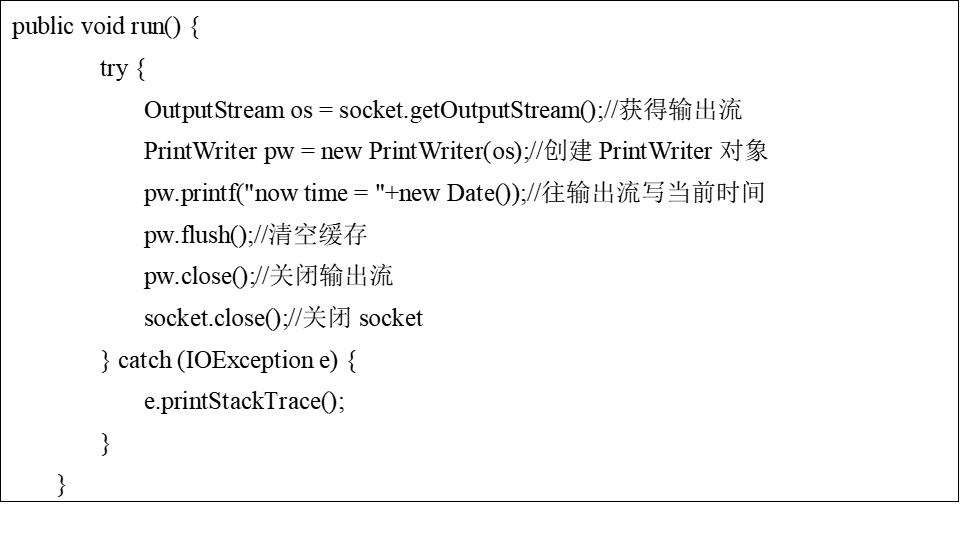
4.3.1 TCP/IP数据通信 19
4.3.2 Servlet数据转发 21
4.4 功能测试 22
4.5 本章小结 24
第5章 总结与展望 25
5.1 总结 25
5.2 展望 25
参考文献 27
致 谢 28
绪论
研究的背景及意义
随着信息技术的高速发展,如何将信息技术引入并服务于制造业,以推动制造业高速发展成为世界各国共同关注的焦点问题。德国政府将“工业4.0”作为国家发展战略列入《德国2020高技术战略》中十大未来技术之一,这标志着以“智能制造”为核心的新一轮工业转型的序幕就此拉开[1]。
与此同时,这场工业革命的浪潮也迅速延伸到包括中国在内的其他国家,世界各国相继制定出一系列相应的战略计划,如美国的“先进制造业国家战略计划”,中国的“中国制造2025”等。这些战略计划的内容虽然各有不同,但是归根结底,它们的出发点和落脚点都是将新一代的互联网和物联网技术引入制造业,推进制造业的智能化转型,稳固和提升制造业的国际竞争力。
数字孪生技术能够监测、模拟、预测并控制实体机器人的运动,能够在实体机器人的全生命周期与之高度拟合并产生高效协同,为在全生命周期内对机器人的优化奠定坚实的数据基础。数字孪生技术是实现数字空间与物理空间之间闭环控制的有效途径。通过数字孪生技术构造出数字空间和物理空间的闭合环路,利用数字模型可以实现对制造过程的实时监控、控制及维护,实现生产制造过程的智能化。正是因为数字孪生技术能将现实与虚拟世界无缝连接,是实现“智能制造”的关键技术之一,近年来数字孪生技术正在引起业内的广泛关注。
基于数字孪生的思想,本文通过对UR5多协作机器人进行仿真建模,搭建网络平台,实现网络平台与实体机器人之间的数据通信,将机器人的运动参数实时回传到网络平台,从而实现对实体机器人运动状态的在线监控显示。
国内外研究现状
数字孪生的概念最早可以追溯到由美国密歇根大学的Michael Grieves教授提出的“与物理产品相同的数字化表达”这一概念[2]。他指出,物理产品的数字模型能够抽象表达物理产品,能够实时模拟物理产品的自身行为及特性。但是由于当时的数字化程度不高,收集物理产品状态信息的能力有限等因素,这一概念并未引起学界的广泛关注。之后,美国国家航空航天局(National Aeronautics and Space Administration,简称NASA)将“孪生”的概念运用到空间飞行器的健康维护中[3]。制造与空间飞行器相同的飞行器模型,通过模型实时监测仿真空间飞行器的实际状况,并以此预测评估空间飞行器的状态,保障空间飞行器的安全。
NASA在其综合技术路线图中给出数字孪生的第一个定义:“数字孪生是指通过利用物理模型、传感器监控、运行历史记录等数据,集成多学科、多尺度的仿真过程,完成从现实空间到虚拟数字空间的镜像映射,反映了相对应物理实体产品的全生命周期过程”[4]。Grieves教授将数字双胞胎定义为“一组完全描述从微观原子水平到宏观几何水平的潜在或实物制造产品的虚拟信息结构体”[2]。
美国国家标准与技术研究院先后提出基于模型的定义(Model Based Definition,简称MBD)和基于模型的企业(Model Based Enterprise,MBE)两个概念[5]。从MBD向MBE改进的要义是创建企业和产品的数字模型,数字模型的仿真分析要贯穿系统生命周期的各个方面和领域。数字孪生的内涵通过MBD和MBE两个概念扩展到产品的全部制造过程。
数字孪生技术的应用在国外发展较快,一些关键技术在企业的实践中得到了验证,并开始探索数字孪生技术在制造行业的各环节中的应用。
近年来,国内大力推动智能制造的发展,学者和企业开始关注数字孪生技术,国内学者陶飞等人基于数字孪生提出了数字孪生车间的概念及实现模式,明确数字孪生车间由车间服务系统、物理车间、车间孪生数据、和虚拟车间构成,阐述了数字孪生技术在车间控制系统中的运行流程及运行机制,为企业在数字孪生车间的实践提供了相应的参考架构,为数字孪生技术在生产制造环节的应用提供理论参考[6][7]。国内学者庄存波等人全面介绍和总结了数字孪生的产生背景和数字孪生技术的概念及发展趋势,把数字孪生技术应用到了产品设计、产品工艺、产品制造和产品服务领域[8]。
由于国内在这方面的起步较晚,上述研究仍是对数字孪生理论的初级探索阶段,但对国内数字孪生技术的发展起到了巨大的推动作用。
本文的组织结构
本文详细介绍了基于UR5多协作机器人的数字孪生系统的设计原理、设计方案以及实现过程,全文共分为五个章节,具体结构如下:
第一章主要论述了本项目的研究背景及意义,阐述数字孪生技术在国内外的研究现状,并阐述了本文的组织结构。
第二章对UR5多协作机器人、数字孪生系统设计过程中涉及的理论知识以及用到的一些软件展开阐述,对Java Servlet的工作原理以及TCP建立连接和断开连接的工作原理进行了深入研究讨论。
第三章首先对整体方案设计思路进行阐述,然后对构建机器人数字孪生模型、构建通信协议以及构建网络平台的设计方案分别展开阐述,明确了设计思路以及实现各模块功能的技术路线。
第四章对数字孪生系统构建的过程及效果进行详细阐述和展示。设计过程分为搭建数字孪生模型、编写网络平台、实现数据通信三个模块。在完成设计任务的基础之上,考虑到网站的可持续性,网站增加了首页,方便后期开发内容的延伸拓展。
第五章对本文的研究内容进行了总结,反思设计过程中的不足之处,提出今后待完善的研究方向。
数字孪生系统的理论基础
UR5型机器人简介
随着科技水平的逐渐提高,工业机器人被应用于多个领域,例如工业制造,设备安装等。六自由度工业机器人是目前普遍应用于焊接、搬运、装配等领域的制造装备之一。
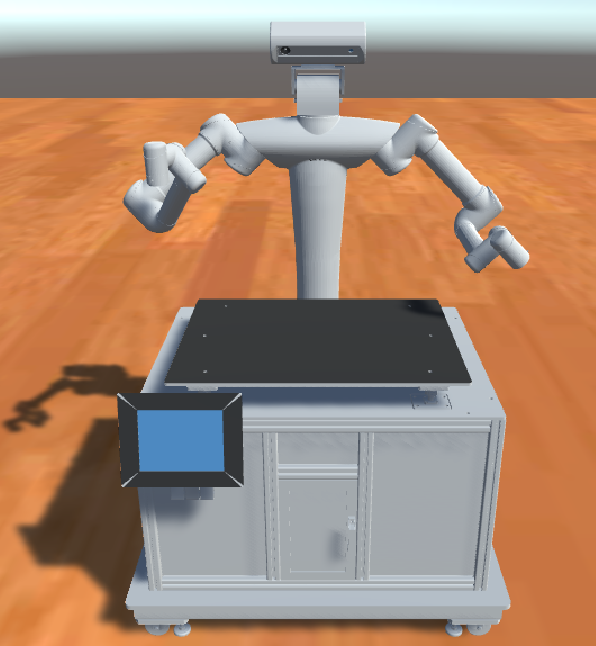
UR5型机器人是由Universal Robots公司开发的轻型六自由度机器人。它主要由腰部、肩部、肘部以及三个腕关节组成,前三个关节负责控制机械臂末端的位置,后三个腕关节负责控制机械臂末端的姿态,机械臂末端的腕关节可以通过连接各种工具以满足实际操作的需求。机器人可以通过各个关节组件之间的协调配合,在其工作范围内实现任意移动。该机器人具有安全易用、灵活轻便的特点,可以完成抓取、放置等轻量级任务,在进行人机交互时无需装配防护围栏。因为机器人质量轻,所以不需要底座固定,可以即插即用。相比于大型工业机器人,UR5型器人具有安全、灵便、低噪音、高能量利用效率等优势。
本文使用的是UR5型双臂机器人。相比于单臂机器人,双臂机器人具有更高的可操作性,通过对双臂的协调性控制,可以更加灵活地完成精细作业,也更便于人机交互的背景下,人对于机器人行为的理解和控制[9][10]。
Web前端开发技术
超文本标记语言
超文本标记语言 (Hyper Text Markup Language,简称HTML)是一种网页开发语言,所谓超文本就是指HTML语言定义的页面内除了文字,还可以包含有图片、视频、音乐、链接等多种非文字元素。HTML由各种各样的标签构建起来,lt;htmlgt;标签出现在整个HTML文档的首尾,是HTML页面的根元素,lt;bodygt;标签包含了可见的页面内容,lt;h1gt;标签定义第一级标题,lt;pgt;标签定义一个段落。
HTML是网页前端的骨架,网页的本质就是超文本标记语言,通过结合脚本语言等技术可以实现很多强大的功能。同时,HTML语言具有强大的兼容性,可以在各种系统环境、各种浏览器中正常使用。
JavaScript脚本语言
JavaScript是一种直译式脚本语言,在实际的工作中可以给网页添加动态响应、读写HTML元素、创建和修改cookies等[11],在Web开发过程中被普遍使用。JavaScript语言的解释器被称为JavaScript引擎,是浏览器的一部分,在运行JavaScript脚本时可以由相应的浏览器直接调用JavaScript引擎逐行解释,因此可以免除对JavaScript脚本预编译的步骤。这种工作机制使用户与浏览器之间的交互操作脱离服务器,用户直接运行通过浏览器运行JavaScript脚本便可实现各种形式的交互操作,减轻了服务器的工作负担,减少了网络数据的传输以及客户端的等待时间。
JavaScript是一种安全性语言,因为它不能将数据写入服务器中,不被允许访问本地的硬盘,而且没有修改和删除网络文档的权限,JavaScript的访问权限仅仅局限于相应的web页面,只能通过浏览器实现信息浏览或动态交互,通过对这些权限的限制,可以有效地防止用户对系统的非法访问以及本地和网络数据的丢失。
Java Servlet
Java Servlet是一种通过Java语言编写的服务器端程序,它是浏览器或其他客户端和服务器之间交互的中间层,主要用于交互式地浏览和修改数据,生成动态Web内容[12]。
由于Servlet没有main方法,不能够独立的运行,它的运行需要容器的支持。Servlet从创建到销毁的整个过程都在容器中运行,因而它的生命周期由容器管理。
Servlet主要完成以下任务:
(1)读取客户端发送来的显式和隐式数据及相关信息,包括网页上的HTML表单、cookies、媒体类型等。
(2)处理数据,根据处理结果创建动态HTML界面并返回客户端。
(3)创建可以嵌入到现有HTML页面中的HTML片段。
(4)与其它服务器资源(包括数据库和基于Java的应用程序)进行通信。
Java Servlet原理流程框图如图 2.1所示。当收到浏览器的调用请求时,服务器会检索Servlet容器中是否已经存在该Servlet实例。如果不存在,就要先对Servlet进行初始化。首先Servlet容器会加载出Servlet的实例对象,然后调用相应的init( )方法对实例进行初始化。待Servlet实例存在之后,容器调用该实例的service( )方法,通过doGet( )和doPost( )方法处理请求。在处理请求时,由Servlet容器创建一个封装有用户请求信息的请求对象Request和一个向客户端返回数据的响应对象Response并传送给Servlet,Servlet对Request包含的请求数据进行处理,并把处理好的结果写在Response中发送至Servlet容器,最后Servlet容器把响应结果反馈给浏览器。
由于Servlet在容器中运行,Servlet的生命周期由容器来控制。一般情况下,Servlet会在收到第一次请求的时候被加载并实例化,它的生命周期也由此开始,在调用结束之后,关闭服务器,Servlet被销毁或者垃圾收集器对资源进行收集时,用destroy( )方法将Servlet关闭。从初始化到被关闭,这就是Servlet的整个生命周期。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: