基于Matlab与V-Rep的UR5协作机器人动力学仿真毕业论文
2020-02-17 21:11:13
摘 要
Abstract 2
第1章 绪论 1
1.1 研究背景及意义 1
1.2 国内外发展现状 2
1.2.1 动力学建模 2
1.2.2 机器人控制方法 3
1.2.3 UR5研究 4
1.3 本文结构 5
第2章 动力学仿真相关理论 6
2.1 运动学分析 6
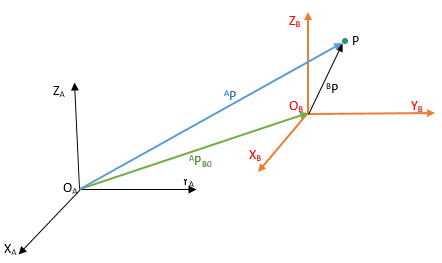
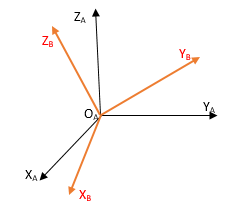
2.1.1 刚体位置和姿态 6
2.1.2 齐次坐标变换 8
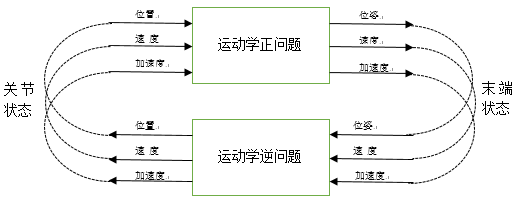
2.1.3 机械臂运动学正问题和逆问题 10
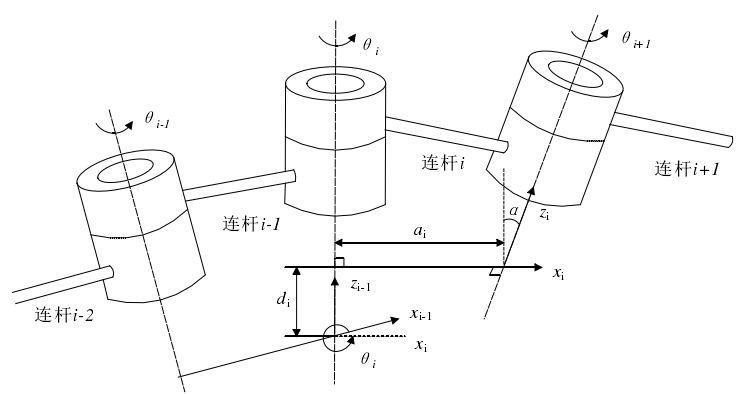
2.1.4 连杆坐标系建立D-H表示法 11
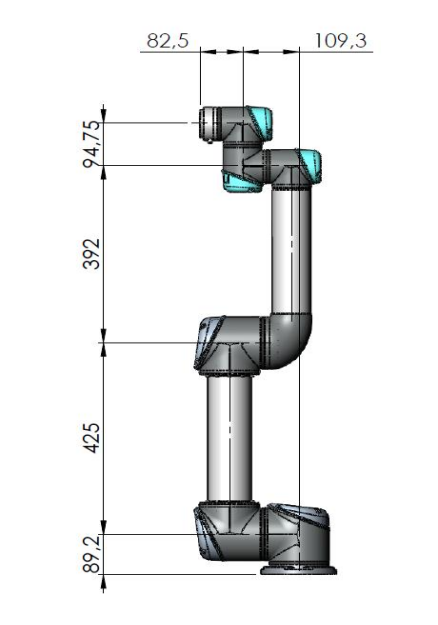
2.1.5 UR5机器人D-H坐标系建立 12
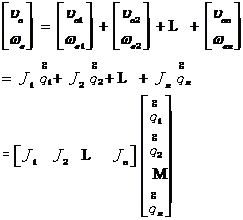
2.1.6 机器人微分运动学 14
2.2 动力学分析 16
2.2.1 欧拉方程 16
2.2.2 动力学建模方法 17
2.3 运动控制 17
2.4 小结 18
第3章 UR5动力学仿真 19
3.1 MATLAB和v-rep通信 19
3.2 V-rep中力矩控制实现 19
3.3 MATLAB中PD控制的实现 21
3.4 仿真运行结果及分析 22
3.5 小结 26
第4章 总结与展望 27
4.1 总结 27
4.2 展望 27
参考文献 28
致 谢 29
摘 要
随着科技的进步,机器人代替了人工广泛应用于各行各业之中,其中工业机器人中的机械臂就是极具代表性的最为广泛应用的一种机器人。本文首先介绍了机器人动力学建模和控制的研究现状。接着分析了机器人运动学问题,介绍了机器臂动力学建模的方法。利用D-H法建立了UR5机械臂杆坐标系,并分析了D-H坐标系下的齐次变换矩阵。紧接着分析了机械臂微分运动学和雅各比矩阵的求法,并分析了D-H坐标系下的雅各比矩阵求法。然后分析了机械臂动力学相关理论知识,运用拉格朗日法对UR5机械臂进行动力学建模,接着介绍了机器人力矩控制方法和PD控制。本文以UR5六自由度机械臂为研究对象,利用MATLAB和v-rep联合对UR5机械臂进行动力学仿真,最终实现了采用力矩控制和带重力补偿的PD控制实现了使UR5机械臂达到目标关节角度的效果。
关键词:UR5机械臂;动力学仿真;力矩控制;PD控制
Abstract
With the progress of science and technology, robots instead of artificial are widely used in all walks of life, among which the robotic arm of industrial robots is the most representative and widely used one. Firstly, the research status of robot dynamics modeling and control is introduced. Then the kinematics of the robot is analyzed, and the method of dynamic modeling of the robot arm is introduced. The bar coordinate system of UR5 manipulator is established by D-H method, and the homogeneous transformation matrix in D-H coordinate system is analyzed. Then the differential kinematics of the manipulator and the Jacobian matrix method are analyzed, and the Jacobian matrix method in D-H coordinate system is analyzed. Then, the relevant knowledge of the dynamics of the manipulator is analyzed, and the dynamics model of the manipulator is established by Lagrange method. Then the control method of robot torque and PD control are introduced. In this paper, the UR5 six-degree-of-freedom manipulator is taken as the research object, and the dynamic simulation of UR5 manipulator is carried out by using the combination of MATLAB and v-rep. Finally, the effect that the UR5 manipulator achieves the target joint angle by using the torque control and the PD control with gravity compensation is realized.
Key words: UR5 manipulator; dynamics simulation; moment control; PD control
- 绪论
- 研究背景及意义
近几十年在机械理论、自动控制技术、电子信息技术和人工智能领域取得的卓越的成就带动了机器人学科的发展。从1959年世界上第一台工业机器人unimate诞生并应用与汽车制造行业到今天为止,现代机器人不过经历了短短几十年时间便从无到在我们的日常生活中随处可见。机器人能够如此快速的发展不仅仅是因为相关技术取得的成果,更是因为它能够代替人类做一些人类不能胜任的工作,并且在完成某些任务上能够具有比人类更高的效率和更好的工作质量。例如至今为止还没有人类登陆火星,但在1997年的火星探路者号便登陆了月球并将火星的信息传送回地球,使我们对火星有了更进一步的认识。
目前使用最为广泛的机器人无疑是工业机器人。而在工业机器人中占绝大部分的机器人类型是机器臂,即仿真人类手臂的机器人,用于替代人完成高强度重复性工作,提高生产效率,从而将生产成本降低。
大部分传统的工业机器人工作时往往会对人类的人身安全造成威胁,因此其周围通常施加有护栏之类的防护措施,这就意味着无法完成一些需要与人类近距离协作完成的任务。因而出现了具有易于操作、灵活性好和安全性高等优点的协作式机器人。在工业中,在某些必须需要人类做的工作中,可用于协助人类,提高工作效率 。在服务行业中,可用与近距离为人类提供服务 。
UR5机械臂(如图1.1)是丹麦优傲机器人推出的世界上第一款商用协作机器人,具有广泛的应用场景。例如在汽车产业中的应用场景有特殊角度拧紧螺丝、打磨去毛刺、搬运、测试、涂胶等。在3C电子行业中的应用场景有上下料、手机屏清洗、攻丝等。在食品产业中的应用场景有挑选、拾取、包装等。在塑料产业中的应用场景有封装、喷涂等。在航空航天产业中运用于模拟及分析检测。在医疗行业中应用于医疗用品的分拣、抓取、样品识别、送样等。在科研教育中可用于测试、拖动示教等。控制UR5机械臂达到一定的关节角度是使UR5可以运用于多种场景完成相应的任务的基础。
随着我国出现社会人口老龄化的趋势,人工生产成本持续高涨。随着工业4.0时代的到来,为了顺应时代发展,提高我国制造业竞争力,我国提出了“中国制造2025”,推动制造业结构转变,关键岗位机器人代替。机器人产业将是推动我国制造业发展的一大动力,研究机器人如何应用于具体场景下处理相关任务具有十分重要的现实意义。

图1.1 UR5实物图
- 国内外发展现状
- 动力学建模
- 国内外发展现状
在对机器人系统进行整体的设计与控制时对机器人的动力学的分析是必不可少的。对于串联型机器人高精度的控制需要引入机器人的动力学分析。机器人动力学主要是研究机器人运动状态与力/力矩之间关系和相互转化的问题,通过对机器人进行动力学建模,可以通过运动状态参数求解机器人的力/力矩,反之也可以。
机械臂被认为是一种典型的多体机械系统。多刚体动力学的研究是经典的研究领域,在计算机出现之前,它仅仅限于理论上的研究和简化的系统。首先Uicker和稍后的Kahn提出了刚体机械系统基于欧拉-拉格朗日方程的方法,用这种方法来对多刚体系统的动力学特性进行数学模拟。Luh,Walker和Paul在动力学数学仿真问题上提出了具有突破性意义的算法,他们提出了多体动力学的运用递归方法进行计算的公式,并应用该方法对串联运动链进行了动力学计算。这个递归公式是基于刚体的牛顿-欧拉方程建立的,后来了Hollerbach证明,以对六轴转动关节操作机械臂的关节扭矩进行计算为例,如果考虑用欧拉-拉格朗日方程直接进行计算,计算量会加大很多。在参考上面的方法的基础上,推导出的一种欧拉-拉格朗日方程的递归算法,计算量虽然比直接运用欧拉-拉格朗日方程进行计算少,但是仍然不如运用牛顿-欧拉方程推导出的递归公式的计算效率。
哈尔,克林芬格和戈蒂埃在1986年提出了一种压缩递归牛顿-欧拉方法,对任意结构的机械臂他们将计算复杂度可以减少到538次乘法和478次加法。在这方面的进一步发展是,巴拉菲和帕特尔给出的结论,对于一般结构的六轴转动机械臂的计算复杂程度可以减少到489次乘法和420次乘法。巴拉菲和帕特尔的算法是基于张量分析的,他们将张量等价扩展到全部范围,减少了运算数量。之后,李和桑克进一步将乘法减少到459次,加法运算为390次[5]。
在过去的六七十年里,拉格朗日方程和牛顿-欧拉方程是两个主流的机器人动力学研究方向自二十世纪八十年代末以来,已经有大量可选择的控制算法来提高建模质量、计算速度、控制精度、鲁棒性、理论普遍性以及对机器人动力学的和运动学认识的广度和深度。相比于早期的拉格朗日方程,以上的大多数方法都基于更先进的数学理论。Brockeet首先利用利群、李代数及其指数映射来处理机器人运动模型并对动力学模型进行了新的拓展。随后,出现了更多新理论。例如,寻找等距同构来线性化动力学方程,寻找特殊的输出函数将惯性矩阵因式分解、扁平化度量表面,应用典型群开发递归动力算法,利用空间算子代数学简化动力学方程,利用李群指数乘积公式通过进一步的惯性矩阵因式分解来减少动力学模型。
除了拉格朗日和牛顿-欧拉方法,美国教授Kane在二十世纪六十年代提出了Kane方法[6]。Kane方法是建立在分析力学的基础上,它通过设置了偏速度、广义力等新变量,并将广义速度作为独立变量看待,将运动方程变成了代数形式,计算过程不需要求动能和反约束力,减少了求导步骤,有效提高了计算机的运算效率。但是普适性差,因为对于不同的系统,偏速度的求解不具有一般性[7]。
- 机器人控制方法
在机器人控制中,不确定性是一直存在的,包括建模不精准,环境中的干扰因素等,因此仅用动力学建模的方法计算力矩来控制是不够的,必须有相应的控制机制来解决这些问题。以下介绍了一些目前发展势头正猛的智能控制方法。
PID/PD控制:是控制理论研究早期发展起来的控制方法,在机械系统运动控制中被广泛应用。因为具有简单的算法,容易实现且具有较高的可靠性和抗干扰能力,因此常被用在模拟控制中。PID控制的算法原理是通过对目标值与实际值之间的进行比例(对系统的误差的直接反映,当检测到偏差时立刻对偏差进行调节)、积分(反映并修正静态误差)和微分(代表误差的变化态势,在误差信号变得太大之前提供修正,即对未来的预测调节)的线性组合以形成控制律最为管家的问题就是对PID参数的设置,对被控制对象实现矫正控制。
鲁棒控制:当对控制系统的不确定性因素影响在一定范围内时,控制系统的稳定性、渐调节性等性能保持稳定,就称控制系统具有鲁棒性,即控制系统地抗干扰能力。鲁棒控制就是具有抗干扰能力的控制系统,在实际情况下机械系统面对的不确定性的干扰是有一定范围的,因此只要设计出来控制系统在面对可能最坏的情况下也能具有抗干扰能力,那么该控制系统就具有较强的鲁棒性。鲁棒控制的方法主要有H控制法、结构奇异值法等。
模糊逻辑控制:是早期智能控制研究提出的一种控制形式,他是模仿了人类思维方式中的模糊性特点,应用模糊集和理论,不需要建立十分准确的数学模型,整体考虑系统的控制方法,因此十分适合应用于不确定性控制系统。相对于传统控制理论中一般是建立基于线性数学模型的控制器,起初的模糊逻辑控制不需要被控系统的数学模型,过多依赖于经验控制,导致在刚开始投入运用时难以进行稳定性闭环分析,妨碍了与基于模型的现代控制之间的融合,因此后来研究人员在模糊控制中引入了模糊模型。
神经网络控制:通过分析模拟人类大脑的一些结构和人类利用自身积累的知识和经验对相关系统的控制方式发展出来了神经网络控制方法,为具有高度非线性和不确定特点的系统的控制提供了解决方案。神经网络在控制中可以用来实现建模或者直接作为控制器来应用。神经网络通过样本的训练利用神经网络的连接机制对数据系统定量进行分布式存储,因此神经网络具有与人类相似的记忆和联想的能力,在通过对大量的数据学习样本的学习,神经网络可以达到满意的控制效果。
自适应控制:通过实时监测输入、输出数据、系统变化情况,掌握控制对象的动态特性,根据收集的系统实时动态及时调整控制器,使控制器自动适应被控对象的变化,降低不确定影响因素的风险,从而保持控制器性能在最优/次优状态。由上可知,自适应控制比一般的反馈控制的性能提高了很多。自适应反馈控制系统一般有两个控制回来,其中一个是一般的反馈控制回路,还有一个是控制参数调节的自适应回路,使得自适应控制对外界的影响具有较强的抗干扰能力。
以上每种控制方法各有各的优缺点,应根据实际的应用场景选择合适的控制方法,并且每种控制方法间可以相互结合,形成更为先进、性能更好的控制方法。
- UR5研究
华中科技大学的菅奕颖对UR5进行了运动学分析,应用D-H法对UR5运动学建模,利用MATLAB中的robotics toolbox工具箱对UR进行了运动学仿真。应用Monte Carlo法对UR5机械臂进行工作空间和活动分析。河北科技大学的赵付祥和张扬对UR5机械臂进行了结构分析,并建立了与厂家提供的数据相匹配的坐标系,并对UR5的奇异位进行了分析。孙梦哲等人应用D-H发利用MATLAB对UR5进行了运动学仿真,模拟UR5进行截骨平面钻孔操作。浙江理工大学的蔡肖肖利用UR5机械臂进行了机器人标定技术研究,通过对UR5应用D-H法建立运动学模型仿真,对末端位姿进行误差分析,研究如何提高机器人的绝对定位精度。南京理工大学的柳洋对UR5运动学建模,进行了运动轨迹规划研究。
综上可知,大部分目前对UR5的仿真研究都是运动学仿真,通过对UR5动力学仿真实现所需的功能。
- 本文结构
第一章阐述了本文的研究背景及意义、机器人动力学建模的发展现状、UR5的研究应用状况。阐述了为什么要对UR5进行动力学仿真以及动力学仿真可以用的方法
第二章阐述了UR5动力学仿真所需要的理论知识,对UR5进行运动学建模和动力学建模,并阐述建模所用的方法,为仿真做好理论前提
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: