基于ROS系统的移动机器人建模与SLAM研究毕业论文
2020-02-17 21:10:30
摘 要
在科技日益发展的今天,机器人技术成为现代社会中亟待解决的问题,尤其是机器人定位与自主规划路径问题。在实际环境中,室外环境可以用GPS进行辅助定位,但由于室内GPS信号弱,误差大等缺点,需要借助其他方法进行辅助定位,顺势产生了同时定位与地图构建(SLAM)技术,SLAM建图技术是目前解决机器人室内定位与路径规划的最优解决办法。
本文主要研究了ROS系统搭建机器人模型,首先针对在仿真环境下利用机器人进行SLAM建图与Navigation导航避障实验,利用SLAM算法实现机器人在陌生环境中的自定位与地图构建功能,利用Navigation导航避障算法实现机器人在已知环境地图中的导航和自主避障的能力。在完成基本要求前提下,实现利用基准参考点,实现在不互通的环境多机建图,以及将SLAM技术和语音控制,机器学习方向做了简单结合,探讨了如何用语音控制机器人进行SLAM建图,让机器人自主如何在复杂的环境中自主避障。研究结果表明SLAM算法与Navigation导航避障算法在不同实验环境下需要选择最合适的算法进行实验,使得所得结果更精确。本文特色在于对不同SLAM建图算法,不同Navigation导航避障算法以及导航避障过程中不同参数变化等多种情况进行了比较,初步得到了一些实验结果,所得分析结果对于以后研究SLAM技术提供思路。
关键词:SLAM;Navigation;多机建图;自主避障
Abstract
Today, with the development of science and technology, robot technology has become an urgent problem to be solved, especially the problem of robot positioning and independent planning. In the actual environment, the outdoor environment can be assisted by GPS. However, due to the weakness of the indoor GPS signal and large errors, other methods are needed to assist the positioning. The SLAM technology is generated by the simultaneous positioning and map construction (SLAM) technology. At present, the optimal solution for robot indoor positioning and path planning is solved.
This paper mainly studies the ROS system to build the robot model. Firstly, the SLAM construction and navigation obstacle avoidance experiment are carried out by using the robot in the simulation environment. The SLAM algorithm is used to realize the self-positioning and map construction function of the robot in the unfamiliar environment. The obstacle algorithm implements the ability of the robot to navigate and autonomously avoid obstacles in known environmental maps. Under the premise of completing the basic requirements, the use of the reference point of reference to achieve multi-machine construction in the non-interoperable environment, and the simple combination of SLAM technology and voice control, machine learning direction, how to use voice control robot for SLAM construction Figure, let the robot autonomously avoid obstacles in a complex environment. The research results show that SLAM algorithm and Navigation obstacle avoidance algorithm need to select the most suitable algorithm to experiment in different experimental environments, which makes the results more accurate. This paper is characterized by comparing different SLAM mapping algorithms, different navigation obstacle avoidance algorithms and different parameter changes in the navigation obstacle avoidance process. Some experimental results are obtained initially. The obtained analysis results provide ideas for future research on SLAM technology.
Key Words:SLAM;Navigation;Multi-machine construction;automatic obstacle avoidance
目录
1 绪论 1
1.1研究目的及意义 1
1.2国内外研究现状 1
1.3 本文主要研究内容 3
2 设计的相关原理 5
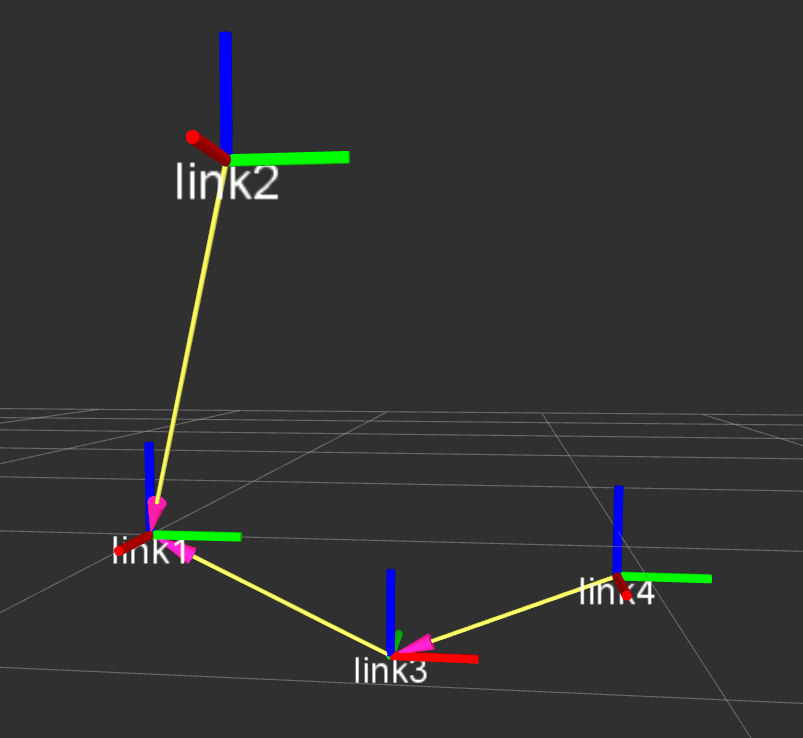
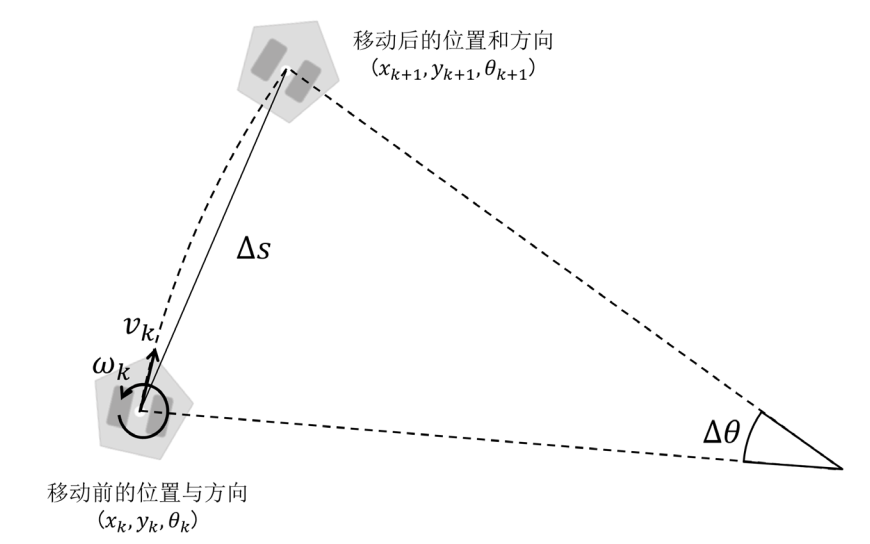
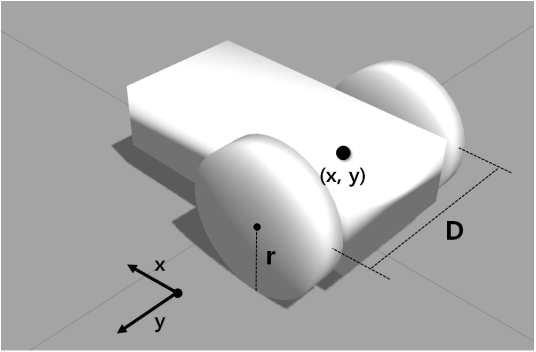
2.1移动机器人建模原理 5
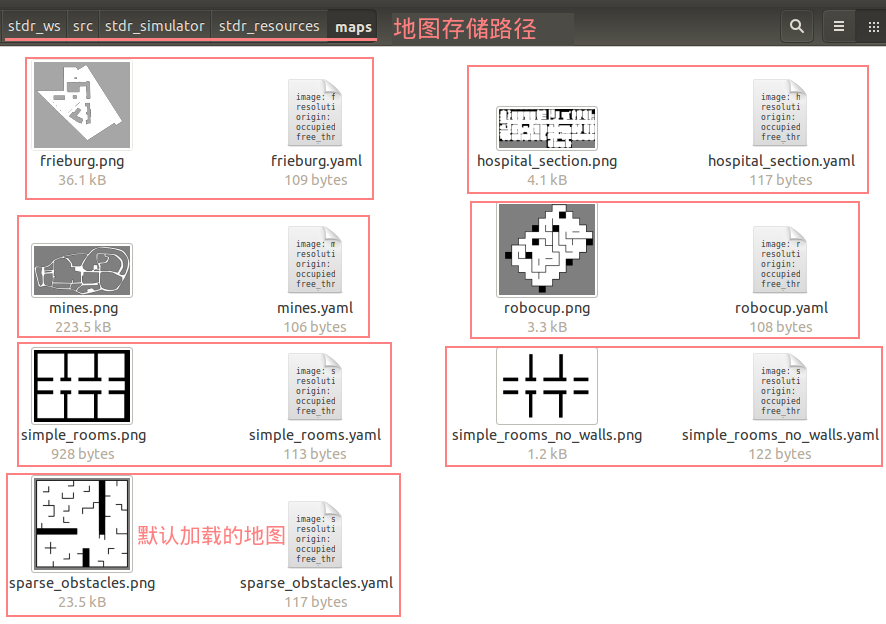
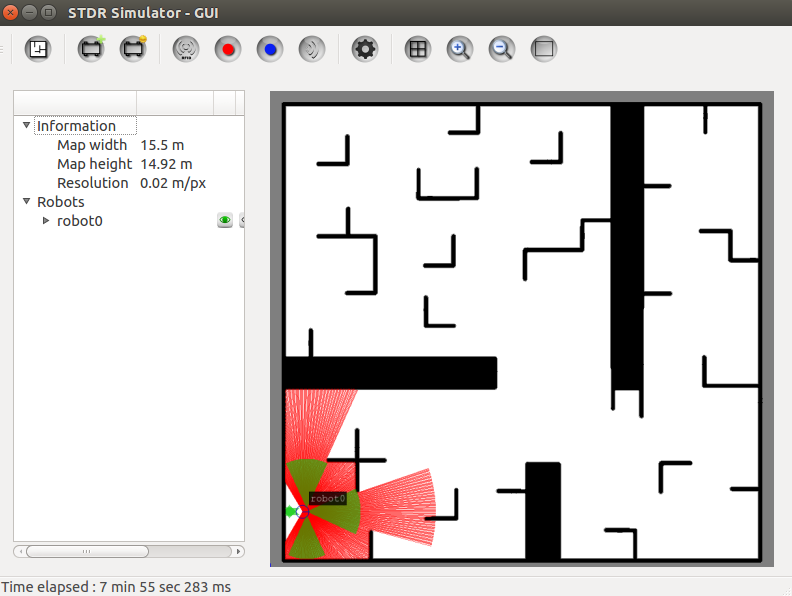
2.2仿真地图搭建原理 7
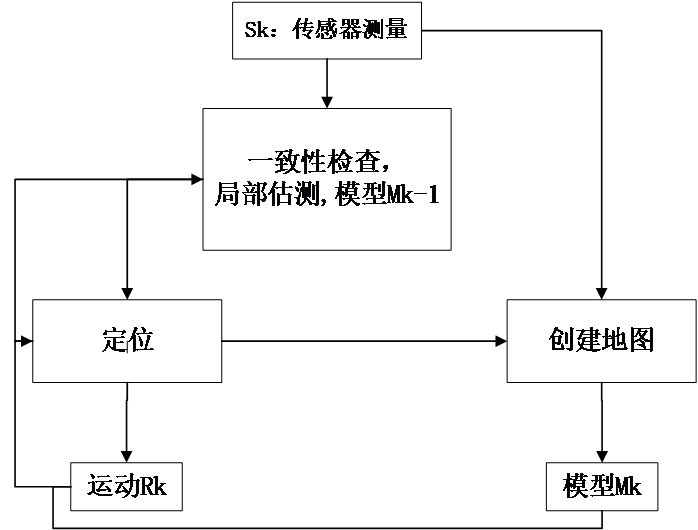
2.3 SLAM建图原理 9
2.3.1 SLAM基本过程 9
2.3.2 Gmapping算法原理 14
2.4 Navigaton导航避障原理 16
2.4.1 DWA算法 17
2.4.2 A*算法 18
2.5多机建图原理 20
2.6语音控制原理 22
2.7自主导航避障学习原理 23
3系统的设计与实现 26
3.1ROS机器人建模 26
3.1.1 ROS机器人建模实验方案 26
3.1.2 实验结果及分析 26
3.2 SLAM建图 27
3.2.1 SLAM建图实验方案 27
3.2.2 SLAM建图实验结果分析 28
3.3Navigation导航避障 31
3.4多机建图 33
3.5语音控制 35
3.6 自动导航避障初步探索 36
4总结与展望 39
4.1 全文工作总结 39
4.2 下一步工作展望 39
参考文献 41
1 绪论
1.1研究目的及意义
在Robot技术迅猛发展的今天,机器人慢慢走进我们的生活已经成为一种趋势,在日常生活、工业生产、科研创新、绿色制造、安全制造、探索未知环境等方面发挥着日益重要的作用,机器人已经被列为国家层面的战略目标,被各个国家尤其是发达国家重视。在未来人类需要探索的高危环境更多,无人机器人就显得尤为重要,其中亟待解决的问题就是机器人自主定位和路径规划问题。解决机器人自主定位和路径规划问题的最大助力就是搭载许多开源代码的ROS系统,可将已解决问题的代码下载进行优化,也可以将已解决问题的代码上传供分享,使得开发机器人更便捷。
机器人研究中最后的目标是机器人能够像人类一样思考、行动,也是机器人研究中一直难以攻克的难题。像人类一样思考的解决办法是机器学习,而像人类一样行动的解决办法是解决机器人自主定位和路径规划问题,同时定位与地图构建( Simultaneous Localization and Mapping, SLAM)技术提出了解决方案。SLAM技术主要用于解决室内环境中GPS信号弱,误差大的问题,该技术主要应用于室内环境的自主定位和路径规划,用传感器先进行自主定位,用激光或者深度相机进行逐帧扫描,逐帧匹配,最后逐渐创建灰度地图。SLAM建图技术在机器人研究中属于一种较为重要的问题。
在ROS系统中,有封装好关于SLAM建图的Gmapping算法包,可以用于在未知环境进行SLAM建图,也有封装好关于Navigation导航避障的navigation算法包,可以用于在已创建SLAM地图的导航避障,这两种类型的算法包为初学者提供极大地便利,也为研究机器人提供了极大的便利。此外,在ROS系统中SLAM技术可以与语音识别和自动学习等相关技术集成,以开辟新的方向。ROS系统类似于操作系统,提供一个开源平台以及操作指令,主要包括硬件集成、程序管理、程序之间通信,源代码库的导入与创建等及其丰富的功能,ROS系统可优化已知算法代码,也可分享新算法代码,使得代码更新效率和传播速度更快,在很大程度上提高机器人的开发效率[1]。
1.2国内外研究现状
R.Smith,M.Self和P.Cheeseman[2]首先提出了SLAM算法的概念,在Ayache and Faugeras[3],Crowley,Chatila and Laumond[4]的实验成果基础上,他们提出了不同的框架,并在空间框架中提出了概率地图的概念,通过线性化及高斯分布假设,运用EKF对状态空间中的机器人位姿和特征(路标)位置进行同时估计。形成框架后,这一方法被其他许多学者采纳,成为一种世界通用的SLAM建图方法。
在传统时代(1986-2004),SLAM问题被提出用于实际需要,并且该问题被转换为状态估计问题,其通过扩展卡尔曼滤波器,粒子滤波器和最大概率估计来解决。在算法分析时代(2004-2015),科学家们主要研究了SLAM的基本特征,包括观察性,收敛性和一致性。在鲁棒性-预测性时代(2015-),科学家主要研究了对高级场景的鲁棒性和理解,最大化计算资源和基于任务的环境认知,并取得了一定的研究成果。Visual SLAM是在传统的SLAM基础上开发的,SLAM通常使用扩展卡尔曼滤波来改善相机模式估计和地图创建精度。随后,随着计算能力的提高和相应算法的优化,BA优化、位姿优化等手段逐渐成为主流。随着人工智能技术的普及,SLAM在机器学习方向被越来越多的研究人员的关注下吸引了进行了深入的学习[6]。
美国是迄今为止具有最大,最深入的地面智能机器人研究所的国家,其研究始于20世纪70年代,并在20世纪80年代取得了重大进展。20世纪60年代后期,斯坦福研究所(SRI)的Charles Rosen和Niels Nielsen从1966年到1972年开发了一个名为Shakey的独立移动机器人,研究人工智能技术在复杂环境中的应用,Shakey具有独立的逻辑推理,能计划和控制运动[7]。Rafael提出了一种同时解决一组平方平面标记的映射和定位问题的新方法,通过分发沿着图的基础周期的旋转和平移误差,获得校正的姿势图形,比运动结构和视觉SLAM技术更稳健[8]。之后Rafael等提出了一种在大型室内环境中获得平方平面标记图的离线SPM-SLAM方法,通过SPM-SLAM方法解决了同时定位摄像机和建立平面标记图的问题 [9], Kim等提出了一种基于视觉SLAM中匹配风险评估的特征选择方法,用于估计匹配风险图像中的每个特征点[10]。Clemens等通过将占用概率建模为随机变量,基于此映射表示推导出SLAM算法,用于构建由β分布随机变量组成的地图,使用这些地图进行本地化[11]。
目前国内商业应用SLAM技术最为成熟的应该是扫地机行业,而扫地机也算机器人里最早用到SLAM技术这一批了,目前国内商业应用SLAM技术最为成熟的应该是扫地机行业,而扫地机也算机器人里最早用到SLAM技术这一批了[7] 。国内Cobos和Tami扫地机器人使用激光或相机雷达搭载本地SLAM算法,使扫地机能够有效地映射内部环境,智能分析和规划运动轨迹,因其成功率高成功进入国内智能导航组机器人。在工业中,SLAM主要用于AGV物流运输车,无需开发任何先进的路线,便于工厂生产线的升级,改变航行路线,避免实时障碍和实现强大的环境适应性,能够更好的实现多AGV物流运输车的协作[7]。Zhang等通过在人造环境中引入结构元素来描述单眼SLAM的稳健方法,证明了基于现实世界的单眼序列所提出的SLAM系统优于现有技术并且并在室内和室外场景中产生准确的结果[12]。Zhao等提出了一种新的子图连接方法,每个本地子图都是使用独立构建的通过解决小规模SLAM来获取本地信息,用于解决大规模同时本地化和映射(SLAM)问题[13]。Fan等提出了基于图像的SLAM动态对象消除融合算法,融合图像用于替换SLAM中的图像序列,可以有效消除动态物体的影响[14]。Li提出了一种新颖的半直接单目视觉同时定位与映射(SLAM)系统,以保持直接方法的快速性能和高精度和闭环能力[15]。
目前,SLAM算法的主要问题在于两个方面:一方面是光学特征点的稳定性与计算复杂性之间的矛盾。理论上,ORB功能质量肯定比不上进行SIFT/ SURF,但规模的较高固定功能的计算复杂度都难以满足视觉SLAM,这需要图形处理单元来加速计算的迫切需求。另一方面,由当前SLAM系统创建的地图仅仅是无意义的任务,这些任务是不准确的并且使用不当。近年来,deep learning在object detection, recognition, semantic segmentation等方面变得越来越有效,使得语义地图的实现成为更稳定的data association。语义地图可以实现更稳定的数据关联。希望在地图中识别静态和动态对象,并且可以在语义级别上进行顶视图。通常,创建语义映射是打破现有SLAM系统性能瓶颈的关键。[16,17]
1.3 本文主要研究内容
本文主要研究为基于ROS系统的移动机器人建模与SLAM研究,首先通过URDF文件或者Xacro文件实现机器人的3D建模,然后使用ROS系统新建或者导入bag文件来搭建实验仿真环境,之后在定位与建图中使用开源软件包Gmapping提供的算法,包括Cartographer,Hector,Karto以及Gmapping算法等,用于完成机器人在陌生环境中的自定位与地图构建功能,同时利用软件包Navigation提供的路径规划算法,包括A* 算法,DWA算法,Greed-Best-First-Search算法,用于完成机器人在已知环境地图中的导航和自主避障的能力,最后在机器人操作系统提供的仿真工具Gazebo中模拟机器人的真实环境,完成该系统测试和验证。在完成基本要求前提下,实现利用基准参考点,实现在不互通的环境多机建图,以及将SLAM技术和语音控制,机器学习方向做了简单结合,探讨了如何用语音控制机器人进行SLAM建图,让机器人自主学习如何在复杂的环境中自主避障,并做了简单仿真。
本篇论文共分为四章,论文工作的主要内容如下所示:
第1章,主要介绍了基于ROS系统的SLAM技术相关的国内外研究现状及研究意义,包括SLAM建图及其Navigation导航避障两部分,同时,对本篇文章所做主要工作进行了章节性的总结与阐述。
第2章,介绍了机器人的3D建模和仿真环境搭建的原理,简要阐述了几种主要的SLAM建图算法和Navigation导航避障算法,之后介绍了SLAM技术和语音控制,机器学习结合的原理,在搭建好的ROS系统平台上对小车进行实验并进行数据采集及数据处理,采集到正确的数据对得到的数据进行分析,得出结论。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: