基于机器视觉的工业机器人油管抓取系统设计与实现毕业论文
2020-02-17 21:07:38
摘 要
在工业4.0这个时代背景下,机器视觉技术在工业自动化生产带来了不可替代的作用,大幅度加快了生产效率,在未来发展过程中有着无限的潜力。机器视觉利用工业相机拍摄模拟人眼获取视觉,从所拍摄的图像内容中获取有关信息,从而进行图像处理转换成机器操作所需要的信息,以便提供给机器人进行各种自动化、智能化操作。
本文针对自动化生产线的上料过程中,对于油管位置出现偏差而无法满足后续生产要求的现状,使用机器视觉技术可以对目标物体进行分析定位,控制工业机器人智能抓取油管归位,通过使用机器视觉原理设计了油管抓取系统。
本文各章节研究的内容如下:
(1)简单描述了本论文研究的背景以及目的意义,介绍了机器视觉技术研究与发展现状,探讨了其未来发展方向。
(2)介绍系统组成部分,分析其工作原理,进行系统框架的整体设计,选择出各自部分需要的硬件以及软件。
(3)研究了相机标定与图像处理过程,通过机器视觉系统的处理,可以从图像获取工件的位置信息,以便后续控制机器人抓取放置操作。
(4)通过系统交互,传输数据控制机器人进行抓取操作,取得较好的实验效果。
关键词:机器视觉;抓取系统;目标定位;工业机器人
Abstract
In the background of industrial 4.0, machine vision technology has brought irreplaceable role in industrial automation production, greatly accelerated production efficiency, and has unlimited potential in the future development process. Machine vision uses industrial cameras to take pictures of simulated human eyes to obtain vision, and acquires relevant information from the captured image content, so as to transform image processing into information needed for machine operation, so as to provide robots with various automated and intelligent operations.
In view of the present situation that the position of tubing is deviated in the feeding process of automated production line and can not meet the requirements of subsequent production, machine vision technology can be used to analyze and locate the target object, control the intelligent grasping of tubing by industrial robots, and design the tubing grasping system by using the principle of machine vision.The contents of each chapter are as follows:
(1) This paper briefly describes the background and purpose of the research, introduces the research and development status of machine vision technology, and discusses its future development direction.
(2) Introduce the components of the system, analyze its working principle, design the whole system framework, and select the hardware and software needed by each part.
(3) The process of camera calibration and image processing is studied. Through the processing of machine vision system, the position information of the workpiece can be obtained from the image, so as to control the manipulation of robot grasping and placing.
(4) Through the system interaction, the data transmission control robot grasps the operation, and achieves good experimental results.
Key words: machine vision; grasping system; target positioning; industrial robot
目 录
第1章 绪论 1
1.1 论文的研究背景及意义 1
1.2 机器视觉简介 2
1.3 机器视觉技术发展现状 2
第2章 基于机器视觉的油管抓取系统设计 3
2.1 整体方案设计 3
2.2 系统的硬件组成 3
2.3 开发环境 7
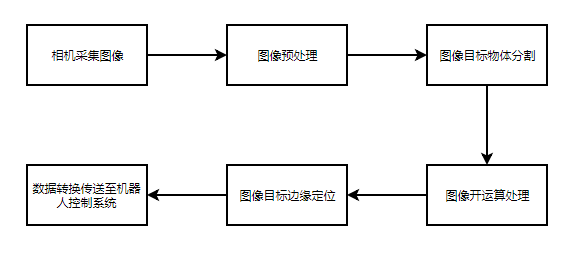
2.4 系统工作流程 7
第3章 相机与机器人标定研究 8
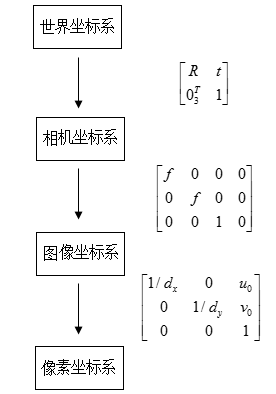
3.1 相机标定 8
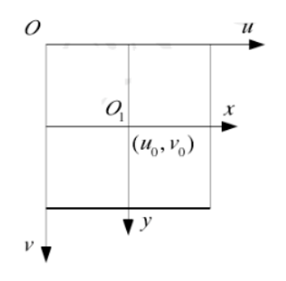
3.1.1 图像坐标系与像素坐标系转换关系 9
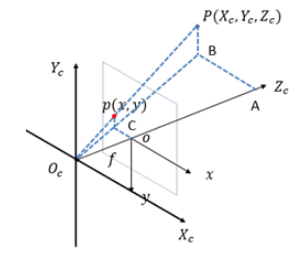
3.1.2 相机坐标系与图像坐标系转换关系 9
3.1.3 世界坐标系与相机坐标系转换关系 10
3.1.4 世界坐标系与像素坐标系转换关系 11
3.2 手眼标定 12
第4章 图像处理及结果分析 13
4.1 图像预处理 13
4.1.1 图像灰度化 13
4.1.2 图像滤波 14
4.1.3 图像增强 15
4.1.4 图像预处理结果 15
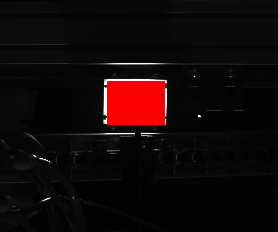
4.2 图像分割 15
4.3 形态学运算 17
4.4 图像边缘检测 18
4.4.1 Canny边缘检测算法 18
4.4.2 边缘检测处理结果 19
4.5 机器人抓取 20
总结 22
致谢 23
参考文献 24
第1章 绪论
1.1 论文的研究背景及意义
工业机器人在我国已广泛应用于各种领域,尤其在工业自动化生产过程中广泛使用,未来的应用层面也在不断拓展。工业4.0时代的到来,机器人行业发展迅速,越来越多的新技术不断涌现,在各行各业中都有所应用。随着产业的不断扩大,生产规模也逐渐加大,对于劳动力的需求也不断增长,工业机器人代替人工已成为时代发展不可避免的条件。所以,加大对工业机器人的研发力度,促使产业向自动化发展,提高生产效率,降低人力层本,对于制造行业转型发展来说是关键步骤。
国外机器视觉技术已经发展成熟,研发出的许多机器视觉系统软件都在广泛使用,具体有开源的Opencv计算机视觉库、德国MVtec开发的Halcon机器视觉算法库,在科研领域和实际生产中不断开发运用。外国发达国家工业水平先进,已经在各种领域运用了机器视觉技术,在军事、生产、科研领域都发挥着极大的作用。
机器视觉技术在国内发展起步较晚[1],但是国家加大对这方面技术的研究投入,得力于高校和企业的辛勤研发,研发水平在不断的提升,发展速度加快,取得了不错的成效。
机器视觉是机器人进行识别、检测、测量、机器人引导等领域的关键技术,具有高效率、高自动化的特点,可以实现很高的分辨率精度和速度。
机器视觉通过相机拍摄图片,运用图片处理的技术,可以从图片中获取物体的关键特征信息,通过计算机分析处理可以定位出物体的位置,通过数据传输给机器人进去抓取操作。运用这种机器视觉技术可以使工厂自动化生产过程的效率大大增加,解决了人力资源成本高的问题,越来越多的工厂不断应用新的机器视觉技术,加快生产效率,机器视觉技术也不断的进步更新。
本文结合实际生产要求,在传统的油管自动上料过程中,油管位置可能会发生偏移,这时就需要机器人准确地进行抓取, 基于以上背景,本文基于机器视觉技术对油管进行定位,控制机器人抓取放置油管进行研究,建立机器视觉系统,使机器人能够识别和定位油管并进行抓取。在整个抓取过程中,对油管的定位是最关键的部分,后续机器人能否准确的进行抓取放置取决于定位的精确性,因此,研究这项机器视觉技术具有极高的应用价值。
1.2 机器视觉简介
机器视觉是人工智能领域的一个重要研究对象,机器视觉技术从提出到发展成熟,已经经历了半个多世纪的发展,其涉及的领域已经遍布工业自动化产业的方方面面,并不断的拓展应用领域。从20世纪50年代开始,研究者机器视觉的概念,到60年代Roberts开始对三维机器视觉进行研究,紧接着70年代,机器视觉开始发展,图像传感器的应用为机器视觉研究提供了基础,后来在80年代,机器视觉技术不断的进步更新,图片处理技术的发展也推动了机器视觉技术的发展。
机器视觉系统是通过相机拍摄获取到的图片[2],传送给计算机系统处理从而获得物体的图像信息;再将物体的图像信息分析处理后转成所需要的数字化信号;然后系统根据不同的信号执行各种程序功能,进而机械设备进行操作。
1.3 机器视觉技术发展现状
在工业4.0时代的大背景下,具备着高精度高效率的机器视觉技术吸引着世界各地研究机构进行研究。自从60年代机器视觉的出现,以美、日、欧为首的科学技术发达的国家开始进行有关内容的研究,再后来,基础电子领域的快速发展,机器视觉技术的发展越来越快,已趋于成熟。
中国的机器视觉技术发展研究比国外起步稍晚,80年代从国外引进主要技术,直到2010年才慢慢发展完善直到成熟。在“工业4.0”、“中国制造2025”等时代背景的支持下,机器视觉技术水平不断进步发展,目前来说,中国的机器视觉技术正向不同领域进行拓展发展,不断扩大应用领域。
随着国际市场的趋于成熟,中国市场正逐渐发展壮大,两者相对发展有着明显的变化趋势。然后欧日美国家的技术发展仍处于主导地位,在不同领域产品上,有着明显的技术优势,占领着全球市场的主要份额,不过,随着时间的推移,我国机器视觉技术发展越来越快,相对于国外,技术水平不断拉近,产业也不断扩大,目前中国机器视觉市场在全球机器视觉市场中占据了第三名的位置。
由于我国对机器视觉技术的发展投资力度不断加大,各种产品不断涌现,专利申请数量已经处于全球领先,不过在应用领域上,在还达不到国际领先的地位。
目前,中国正在成为世界机器视觉发展最活跃的地区之一[3],中国机器视觉技术将在不久会在世界上成为焦点,同时,中国已经成为全世界的制作中心,许多先进的机器视觉系统也进入了中国。因此,面对发展的机遇中国必须得牢牢抓住,不断进行技术研发创新,促进行业稳定的发展。
第2章 基于机器视觉的油管抓取系统设计
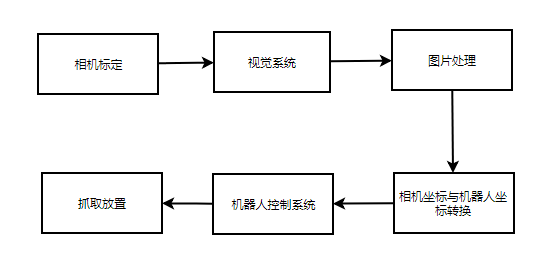
本章主要介绍和说明基于机器视觉的机器人油管抓取系统方案的设计,机器视觉系统负责图片信息的收集处理,转换成为机器人的控制信息,机器人控制系统将根据机器视觉系统提供的有效信息,进行抓取放置操作。
2.1 整体方案设计
如图2.1所示为系统的整体结构框图,上方为机器视觉系统组成,下方为机器人控制系统组成。
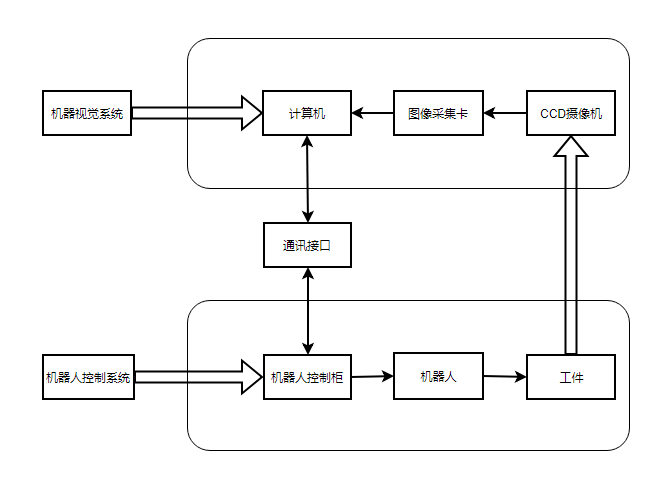
图2.1 视觉系统整体框图
2.2 系统的硬件组成
测试的环境包括自然环境、硬件环境以及软件环境。在自然环境中,测试温度为15℃,相对湿度为56%,海拔高度为23.3m。其中系统的硬件环境如图2.2所示。
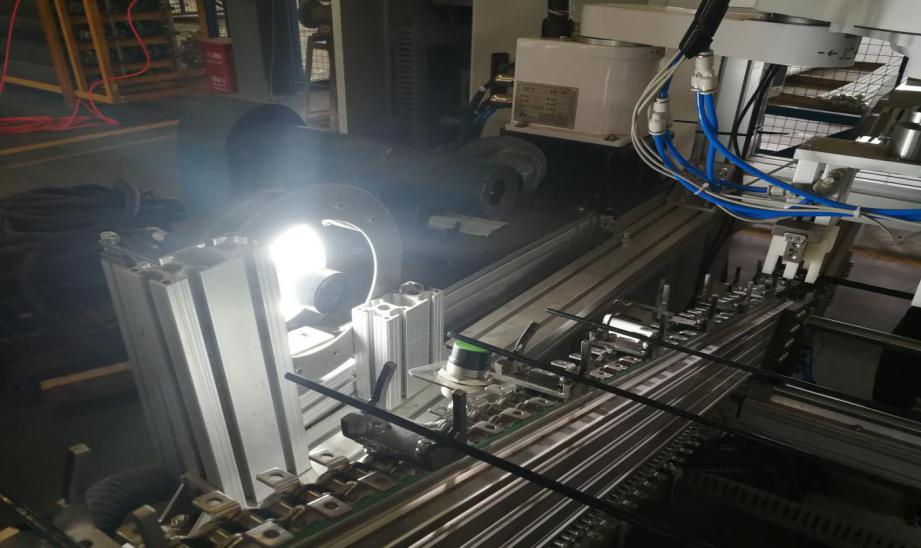
图2.2 系统硬件环境
硬件主要设备选取如表2.1所示。
表2.1 主要设备清单
序号 | 名称 | 数量 | 生产厂家 |
1 | 工控机 | 1台 | 研华 |
2 | 工业相机 | 1个 | 大恒 |
3 | 远心镜头 | 1个 | 嘉利 |
4 | 球积分光源 | 1个 | 喻德 |
5 | SCARA机器人 | 1台 | 华中数控 |
6 | 异步电机 | 2台 | 玉豹 |
系统主要硬件选取介绍:
(1)HSR-SR6600机器人
基于项目的设计特点和技术需求,最终选用型号为HSR-6600的四轴SCARA机器人,SCARA机器人具有运动灵活、体型小、运行速度快、工作效率高等特点,适用于在有限空间内机械式地搬动和取运油管。如图2.3所示。
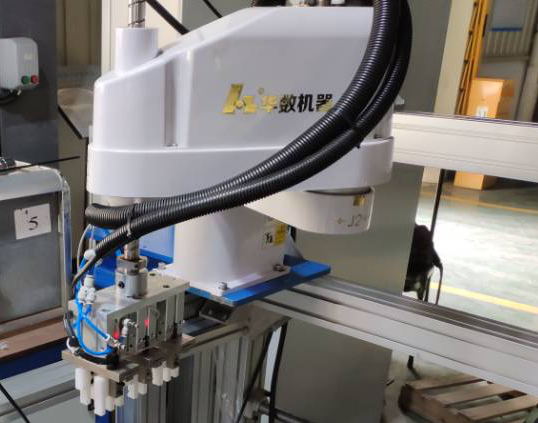
图2.3 SCARA工业机器人
(2)工业相机
工业相机按照图像的传感器元件的不同可以分为CCD工业相机和CMOS工业相机,前者采用的是电荷耦合元件,后者所使用的则是金属氧化物导体元件。相对来说,CCD相机的输出节点统一,信号的一致性好,并且较CMOS相机来说在技术上更为成熟,成像的质量更好,虽然COMS相机图像的输出速度更快,但在本项目中CCD相机的输出速度已经足够了,故使用的相机为CCD相机。
CCD相机根据其感光单元的排列方式又可以分为线阵CCD相机和面阵CCD相机两类。线阵CCD相机的传感器感光元件只有一行,成像是逐行进行的,需要相机对检测物进行整体的扫描才能得到完整的信息,因此要有诸如传送带一类的运动部件辅助才能完成整体的成像,一般在需要极大的视野或极高的精度时选用线阵的CCD相机。面阵CCD相机,其传感器的感光元件为一个矩形,能够直接采集一幅二维图像,直接在显示器上进行图像数据的输出。
本项目决定使用面阵的CCD相机进行图像的采集。考虑到检测的精度和速度以及市场价格等一系列的问题后,最终采用大恒公司生产的型号MER-504-10Gx-P的相机,其基本参数如表2.2所示。
表2.2 相机基本参数
性能 | 参数 |
分辨率 | 24482448 |
传感器类型 | CCD |
像素尺寸 | 3.45μm×3.45μm |
像素深度 | 8bit、12bit |
信噪比 | 48dB |
同步方式 | 外触发、软触发 |
(3)相机镜头的选择
工业相机选定之后,镜头的选取也是很重要的一步。镜头的种类有很多,根据不同的角度可以对镜头进行各种分类,机器视觉上常用的镜头主要包括普通镜头和远心镜头。远心镜头主要是为了纠正普通工业相机的视差问题而设计的特殊镜头,它在一定的物距范围内,得到的图像放大倍率不会随着物距的变化而变化,它最大的优点是放大倍数恒定,不随景深变化,无视差,虽然成本上会高一些,但是成像效果是普通镜头无法比拟的,因此选择使用远心镜头。确定使用远心镜头后,倍率的选择也十分重要,对于远心镜头来说,其倍率越大,所呈现的视场范围则越小,相应的其所表现的被测物信息则更加细致。最终,根据被测油管图
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: