脚踝康复机器人的上层控制系统设计开题报告
2020-04-12 16:04:03
1. 研究目的与意义(文献综述)
1.1 研究目的及意义
当下我国已逐步进入老年化社会,老年人在年龄增长过程中,生理机能会出现显著衰退,肢体灵活性也会不断下降。此外,由于各种疾病和交通意外等造成的关节和肌肉损伤的病人正在日益增加。医学理论证明,对于肢体损伤患者,在进行前期的手术与药物治疗之后,进行适量的、科学的术后康复训练能够有效地提高肢体运动机能的恢复效果。传统的康复方法需要康复师对患者进行一对一的人工康复,康复成本比较高,同一病人接受康复训练的时间有限,康复效果往往不佳。采用机器人来辅助病人进行康复训练,而且可以制定科学合理的康复训练任务,让机器人带动患者进行运动,加快患者肢体运动能力的恢复。机器人还能够记录康复训练过程中肢体的各项参数,作为康复医生评估康复效果的依据。
气动肌肉是一种与人类肌肉输出特性类似的柔性气动驱动器件,它具有质轻、输出功率/自重比大、安全性好、清洁、价格低等优点,其输出力随着收缩位移的增大而减少。由于上述优越的特性,在康复医疗工程领域的相关应用中,气动肌肉具有很好的优势。
2. 研究的基本内容与方案
2.1基本内容及目标
气动肌肉是一种新型的柔性驱动器,具有重量轻、输出功率/重量比大、安全性好、价格低廉和清洁等优点。现在针对一个具有两自由度三根气动肌肉驱动的脚踝康复机器人先设计一个PID控制方法,然后在其基础上增加一个上层控制算法来实现简单的人机交互,最后通过上位机软件(Labview)来实现对机器人的实时控制。本文主要内容如下:
(1)气动肌肉的工作原理及脚踝康复机器人运动学分析。
在介绍气动肌肉基本结构、工作原理与工作特性的基础之上,利用能量守恒原理获得了气动肌肉的理想模型。由于气动肌肉理想模型与实际存在较大偏差,结合实验方法,利用迟滞模型建立了气动肌肉的实验数学模型。同时,介绍脚踝康复机器人实验平台的工作原理、硬件组成,开发机器人的上位机软件控制系统,分析机器人的运动学原理,为后续的机器人控制做铺垫。
(2)气动肌肉驱动脚踝康复机器人的位置控制研究及实验验证。
由于气动肌肉的非线性、参数时变以及机器人本身的多输入多输出耦合因素,脚踝康复机器人的控制十分复杂,传统的控制方法很难达到精度要求。提出了模型补偿自调节控制器用于机器人的位置控制,通过控制器在阶跃响应以及正弦跟踪实验中的表现,验证了控制器的有效性。
(3)气动肌肉驱动脚踝康复机器人的力控制研究及实验验证。
由于本文研究的机器人存在冗余驱动,导致机器人关节驱动力不唯一,对其进行力控制之前必须先对机器人进行驱动力优化,合理分配各驱动支路的力。力控制采用基于位置内环的阻抗控制方法,通过调整机器人末端执行器位置和力的关系来实现力控制。最后,采用实验验证了控制方法的有效性。
本文通过计算机软件编程实现PID控制方法,PID控制是一种经典的控制方法,其控制算法简单、易于实现,控制可靠性较高,在工业控制领域具有非常广泛的应用。PID控制器主要由比例环节(Proportion)、积分环节(Integral)和微分环节(Different)三部分组成,其公式如式2-1。系统通过对实际输出与期望输出之间的误差进行比例、积分、微分运算,并对它们的计算结果进行求和,以此获得控制量。
 |
式(2-1)
2.2技术方案及措施
机器人通过数据采集卡与上位机进行通信。气动肌肉通过气源供气,供气量由气压比例阀的输入电压决定。数据采集卡与上位机采用USB接口连接,它一方面能够通过A/D转换将机器人位移传感器与力传感器采集的模拟电信号转化为数字量,发送给上位机控制软件进行处理;另一方面还可以通过D/A转换将上位机通过控制算法计算得出的数字控制量转化为模拟电压输入信号,发送给气压比例阀。气压比例阀可以根据该电压信号调节气动肌肉的进气量,进而控制其进行相应的运动。如图2-1
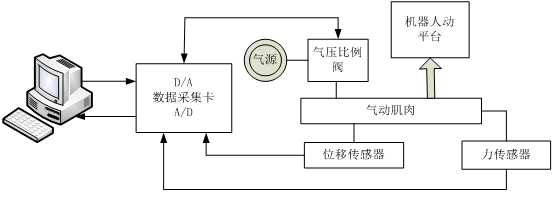
图2-1原理图
本文研究的脚踝康复机器人采用并联结构,动平台运动主要通过三根气动肌肉驱动器的协同运动来实现。机器人位置控制能够让机器人动平台按照预设的期望运动轨迹进行运动,从而带动病人脚踝进行康复训练,机器人位置控制系统方案如图2-2所示。
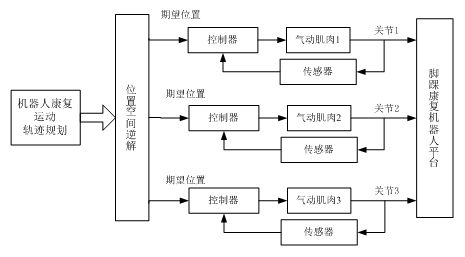
图2-2 机器人位置控制系统方案
由该控制系统方案图可知,对机器人进行位置控制时,首先要对机器人康复运动进行轨迹规划,确定动平台的运动方向与运动速度。然后,利用上一章提到的机器人位置空间逆解,将期望的动平台运动轨迹转化为机器人的关节位移,进而通过控制器进行控制。在控制系统每一个驱动关节的控制回路中,传感器得到的反馈信号与期望输出不断地进行相减运算,通过得到的误差,对驱动器位置进行不断的调节,实现系统的闭环控制。因而,控制器性能的好坏会直接影响机器人位置控制的精度与稳定性。整个控制系统中,康复运动轨迹规划、位置空间逆解以及运动控制算法由上位机软件实现,产生的控制信号量可以对气动肌肉驱动器进行控制,从而使机器人动平台按照预定轨迹进行运动。
3. 研究计划与安排
第1-3周:查阅相关文献资料,明确研究内容,了解研究所需理论基础。确定方案,完成开题报告。
第4-5周:熟悉掌握基本理论,完成英文资料的翻译,熟悉开发环境。
第6-9周:编程实现各算法,并进行仿真调试。
4. 参考文献(12篇以上)
[1] jamwal p k, hussain s, ghayesh m h, et al. impedance control of an intrinsically compliant parallel ankle rehabilitation robot[j]. ieee transactions on industrial electronics, 2016, 63(6):3638-3647.
[2] chen s h, lien w m, wang w w, et al. assistive control system for upper limb rehabilitation robot[j]. ieee transactions on neural systems amp; rehabilitation engineering a publication of the ieee engineering in medicine amp; biology society, 2016, pp(99):1-1.
[3] 尹贵, 张小栋, 陈江城,等. 下肢康复机器人按需辅助自适应控制方法[j]. 西安交通大学学报, 2017, 51(10).



