基于DSP的车辙实时检测系统设计与实现毕业论文
2020-04-01 11:03:51
摘 要
随着国家公路的建设,我国公路运输业得到了巨大的发展。但同时特带来了许多问题,首先我国的公路建设比较晚,技术不够成熟且超载现象比较严重,加上我国的优质路面比较少。因此公路破坏比较严重,车辙就是道路破损的最常见的一种病害。
对于车辙的检测,本文提出了一种基于线激光的自然条件下路面实时检测方法。在不停车的自然状态下,采用线阵激光器连续向路面发射线激光,通过高分辨率相机实时获取路面车辙激光线图像。针对复杂路面车辙激光线难以提取问题,对路面车辙线激光图像进行了特征分析,给出了非负测度及非负强度计算公式,利用峰值连续性快速跟踪路面车辙激光线的显著脊点与非显著脊点,提出了基于非负特征和峰值连续性的路面车辙激光线提取算法。在不封路、不停车、不阻碍交通条件下,进行了大量的路面测试,实验结果验证了本文方法的有效性和准确性,确保提取的车辙激光线与车辙激光线的实际光点象素是逐一对应的,解决了自然条件下路面车辙激光线的实时提取问题,为路面车辙的全自动在线检测及路面质量评价提供了关键技术。
关键字: 车辙,路面检测,线激光,非负特征,峰值连续性
Abstract
With the construction of national highways, China's road transport industry has been greatly developed. But at the same time, it has caused many problems. First of all, China's road construction is relatively late, the technology is not mature enough, and the overload phenomenon is serious. In addition, there are relatively few high-quality pavements in China. Therefore, road damage is more serious and ruts are the most common type of road damage.
For the detection of rutting, this paper presents a real-time detection method for road surface under natural conditions based on line laser. In the natural state of not stopping, the line laser is used to continuously emit line laser light to the road surface, and a high-resolution camera is used to obtain the road car's laser line image in real time. In order to solve the problem of difficult to extract the rut laser line on complex roads, the characteristics of the laser image of the road rutting line were analyzed. The calculation formulas of non-negative and non-negative strengths were given. The peak continence was used to quickly track the prominent ridges of the road rutting laser line. With significant ridge points, an on-road rutting laser line extraction algorithm based on non-negative features and peak continuity was proposed. A large number of pavement tests were conducted without stopping roads, stopping, and obstructing traffic conditions. The experimental results verified the validity and accuracy of the method and ensured the actual spot pixels of the extracted rutting laser line and rutting laser line. Correspond to each one, it solves the problem of real-time extraction of road surface rutting laser lines under natural conditions, and provides key technologies for automatic on-line inspection of pavement rutting and road surface quality evaluation
Key words: Rutting, pavement inspection, line laser, non-negative features, peak continuity
目 录
第1章 绪论 1
1.1 研究的目的及意义 1
1.2 国内外研究现状 1
1.3 论文主要工作及结构 2
第2章 车辙的检测 4
2.1 车辙简介 4
2.1.1 车辙的定义及分类 4
2.1.2 车辙产生的原因 5
2.1.3 车辙形成的过程及危害 5
2.2车辙的检测综述 6
2.2.1 车辙检测方式的演变 6
2.2.2 车辙检测原理 7
2.3 本章小结 9
第3章 数字图像处理综述 10
3.1 数字图像处理简介 10
3.1.1 图像处理技术分类 10
3.1.2 数字图像的表示 10
3.1.3 数字图像处理的主要内容 11
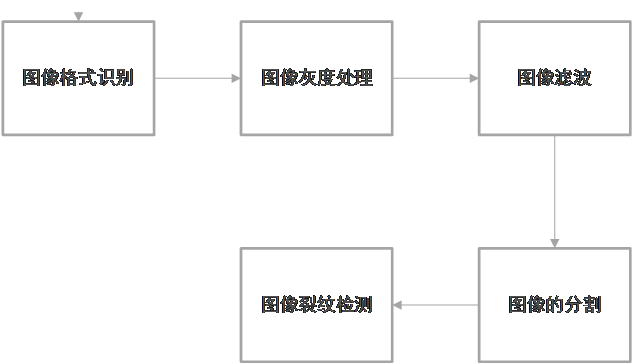
3.2图像处理过程 11
3.2.1 图片的格式识别 12
3.2.2 图像的灰度处理 12
3.2.3图像的滤波 13
3.2.4 图像的分割 14
3.3 本章小结 15
第4章 基于DSP的车辙图像处理的算法 16
4.1 DSP综述 16
4.1.1 DSP简介 16
4.1.2 DSP处理图片的流程 16
4.2算法比较 18
4.3 基于非负特征和峰值连续性的提取算法 19
4.3.1 算法参数定义 19
4.3.2 算法模块 21
4.4 实验结果分析 23
4.4.1 图片滤波图像 23
4.4.2 非负强度计算 24
4.4.3 显著脊点跟踪 24
4.4.4 非显著脊点的跟踪 25
4.4.5 结果对比分析 26
4.5本章小结 27
第5章 总结与展望 29
5.1论文小结 29
5.2未来研究展望 29
附录A:主程序代码 31
致谢 34
第1章 绪论
1.1 研究的目的及意义
由于我国的公路建设不是很完全,超载现象比较严重,技术也不是很成熟,这就导致了我国的路面破损比较严重。早期修筑的公路因为使用时间过长,也到了设计的年限,因此对路面进行检测和养护就成了当前面对的主要问题。
其中车辙就是路面出现的最常见的一种病害,特别是在高速公路上面,车辙已经成为影响行车安全性的一种主要的病害。倘若能对车辙进行实时的检测和跟踪,就能提早的解决问题,降低车辙的危害。但是传统的检测方法精度低,效率低下,很难做到检测的实时性。为了提供一种对路面实时检测的方法,提高效率,这就是本文需要研究的。
为了做到车辙的实时检测和研究,首先需要在路面上用数字相机进行图像的采集,然后将采集到的图像存入计算机完成图像的获取,这一步是为了为后续图像的处理提供清晰的原始图片,再利用计算机完成对图像的加工和处理的过程,完成车辙图像的提取,这也是本文所研究的方向,最后将处理好的结果反馈出来,完成报告[2]。整个车辙实时检测和研究的流程,如图1.1所示。
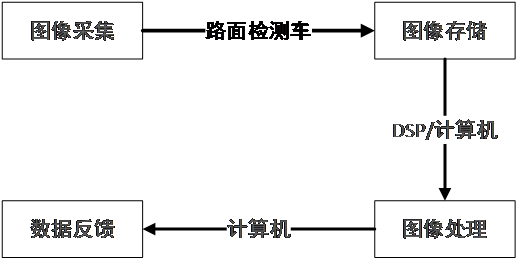
图1.1 车辙检测流程
1.2 国内外研究现状
现在国内外关于车辙的检测和研究的总体趋势是:从人工检测到半自动检测,再由半自动检测再到全自动检测,从低速,低效率的人工检测到高速,准确,高效的自动化检测。
- 国外研究情况
1969年加拿大的科研工作者首先开始了对路面检测车的研究,使用摄影车对路面的一些情况进行采集,然后将采集到的图片打印出来,进行路面破损的判断。这种方式虽然也是用人来进行判断和识别的,但是这种检测方式第一次将检测转入到了室内,很大程度上减少了检测人员的危险,也开启了路面检测的雏形。
日本的小松集团研制出了第一套包括路面检测和数据采集处理系统。该系统含括照明系统,数据的采集系统,影像记录系统等。但是,由于其过高的成本制作,很难在市场上得以推广,但是它开启了全自动检测和处理数据的研究领域。同时期,英国研制出了PAVUE系统。其改进的部分在于对采集图像时,降低了由于高速采集导致的图像模糊度。
瑞士联邦研究所应用了当时最前沿的激光技术和全息图像处理技术,研发出了路面全息识别系统。试图去解决图像分辨率和处理时候的技术问题,以此来建立一个完全智能化的路面检测系统。该系统将采集到的图像实时预处理,数据分析,得到路面检测的结果。由于是实时完成这一过程,检测效率提高了很多。当然它也有不足:采集时候对路面平整度要求很高,成本也很高。
在车辙的检测和研究中,路面信息的采集是最为重要的,这也直接关系到后面数据的分析和处理。近年来,CCD技术取得了巨大的发展,CCD摄像机能够自动调节平衡,使得采集到的图像分辨率更高,这就为车辙的采集工作提供了更好的平台。美国研制出来的RoadCrack检测车安装了实时的监控摄影机,能够完成多角度拍摄,而且还安装的高精度的距离传感器,能控制图像的空间占有率。现在RoadCrack检测车已经遍布全球多个国家,是路面检测的主导了[3]。
- 国内的研究情况
我国的路面检测研究发展比较晚,开始于20世纪80年代。当时我国公路建设迅猛,大大的增加了公路的养护。20世纪90年代,国内开始进行路面检测的研究,近些年通过引进和研发取得不错的进展。
2000年开始,南京理工大学开始对全自动路面检测的算法进入研究,且取得了一定的进展。2002年,南京理工大学研制出了N-1型路面智能检测车。该车能在70km/h的速度下,快速的检测出路面车辙的相关信息,这也是我国的第一台路面检测车,打破了国外在该领域的垄断,该检测车的某些功能还达到了国际的水准。
2006年,东南大学研制出的亚特勒斯车辙仪能够直接用红外传感仪将车辙的深度测出来,测出的数据分辨率小于1mm。
由武大卓越公司和武汉大学一起研制出来的ZOYON-RTM智能检测车,一举打破了传统检测的极限,行车的速度最高可达120km/h,车辙测量精度在1mm以下,能够完全的自动完成数据的采集,分析,分类和存储[4]。
尽管我国在路面检测中取得了很大的成果,但是和世界的顶级技术还是有一定的差距。路面车辙的检测主要是基于数字图像处理检测技术,应用前景非常的广阔,值得我们进行深层次的研究。
1.3 论文主要工作及结构
图像的采集主要是利用线激光车辙仪利用CCD成像及模式识别方法,通过几何光学理论进行高程测量,将路面车辙深度的测量转化为基于图像测量。本次研究主要是基于DSP的图像处理算法研究,利用非负强度算法,能将采集到的车辙图像中的车辙快速,高效,准确的提取出来,并在DSP上面完成相应的实验。
本文的结构安排如下:
第1章,绪论。主要是介绍课题研究的意义和方法,并详细的介绍了国内外关于路面检测的研究情况。
第2章,车辙的检测。先是对车辙的一些定义进行阐述,然后对车辙的分类,产生的原因,危害等进行了相关的解释说明。最后在对车辙图像的提取过程进行的流程进行介绍,并给出了车辙的深度的计算方式。
第3章,对数字图像处理中的相关基本理论进行了阐述。图像处理过程中的灰度,滤波等处理进行了相关的介绍。
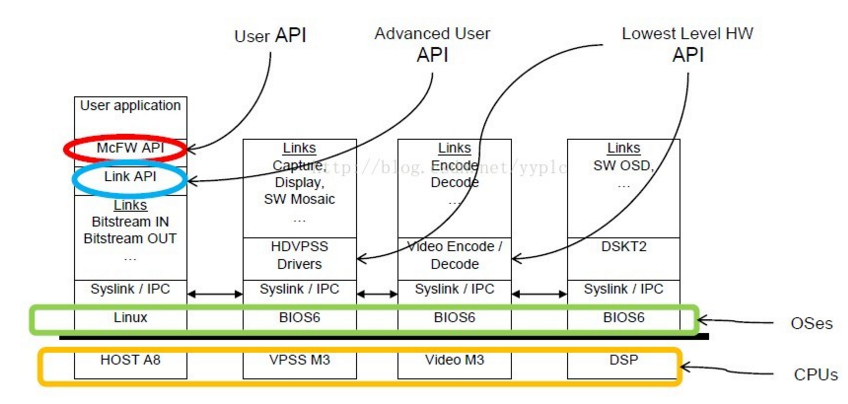
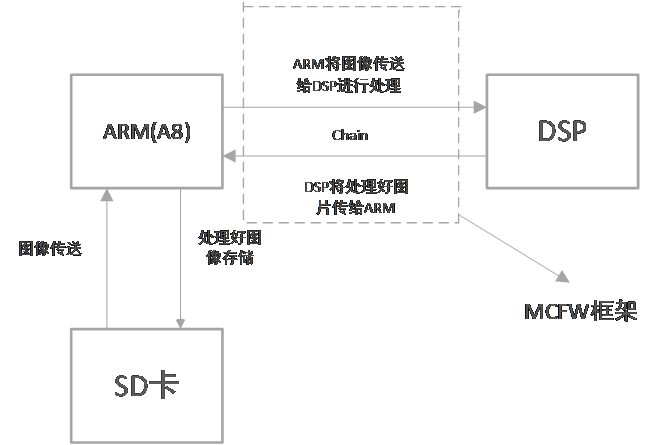
第4章,算法理论和实验结果。先是简单的介绍了DSP的定义和特点,并介绍了DSP在处理算法时候内部通信的过程。车辙提取的算法是整个论文的核心,介绍了非负特征和峰值连续性的路面车辙激光线提取算法的相关原理,最后对实验的结果进行了简单的分析。
第5章,总结和展望。对于车辙图像的实时提取和研究是一个比较热门的方向,有着很广阔的应用前景,是很值得深入研究的。
车辙的检测
2.1 车辙简介
2.1.1 车辙的定义及分类
(1)车辙的定义
车辙是指车辆在行进的过程中在路面上留下的压痕。路面由于长期的碾压,路面层会被压密,轮迹带下沉,侧边不断的隆起。时间越长,车辙会越来越明显,路面就会受到永久性的变形。这种路面的变形会影响车辆在行驶过程中的安全。车辙俨然已经成为公路病害的主要形式,同时车辙也是检测路面的一个很重要的指标,典型的车辙模型如图2.1所示。
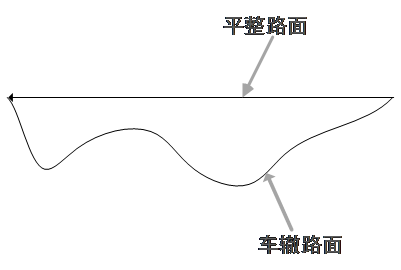
图2.1 典型的车辙模型
相应的研究表明:当车辙深度有5mm时,会对高速的车辆一定的影响,当车辙深度有10mm时,路面已进入危险状态,当车辙深度达到20mm以上的时候,路面已经严重破坏掉了[5]。
(2)车辙的分类
由于路面被车辆反复的作用,且这种作用常常伴随着挤压,路面材料会出现塑性流动。根据车辙形成的原因,可以将车辙划分为以下四种类型,如图2.2所示。
磨损型车辙
压缩型车辙(V型车辙)
车辙的分类 结构型车辙(U型车辙)
失稳型车辙(W型车辙)
图2.2 车辙的分类
磨损型车辙最多发生在沥青路面中,由于路面和轮胎的不断摩擦和外部环境的共同作用下,路面不断的进行磨损,从而形成了磨损型车辙。
压缩型车辙多是由车辆和路面的挤压和沥青混领土路面自身压密形成的,车辙的形状多呈为“V”型,所以压缩型车辙也叫V型车辙。V型车辙的深度一般在5mm以下,对路面质量影响不是很高,但如果在初期处理不当,也有可能形成较大的隐患。
结构型车辙截面类似于“U”型,所以又叫U型车辙。结构型车辙主要是由于路面设计不合理造成的。由于长时间的车辆的碾压,路面两端隆起,中间凹陷。
失稳型车辙是由于车辆长时间的荷载造成的。当路面材料失稳的时候,路面会有明显的隆起。如果车辙的深度在20-50mm之间,会对车辆的形式造成严重的损害。失稳型车辙也是破损公路的主要表现形式,也是我们目前研究的主要对象。
2.1.2 车辙产生的原因
对于车辙,我国往往是对路面的材料和设计进行车辙的治理,很是缺少对车辙的现状的评价。终究原因就是我国缺少及时,高效,准确的车辙检测设备,很难第一时间获取相应的车辙信息,也就无法及时的进行处理。车辙的形成因素主要包括两个主要的因素,内在因素和外在因素。
(1)路面的结构设计不是很合理,有些路面铺设的太厚,有些路面铺设的太薄,使得路面的受力不均匀,路面的空隙率较大,从而导致路面发生形变。
(2)所用的材料不过关。铺设路面所用的材料对高温很是敏感,温度越高,混合物的抵抗变形能力变低,车辙形成的也就越明显。
(3)国内有些地方夏天温度较高,大大的超过了路面能承载的极限。还有就是我国公路运输超载现象比较严重,这些都是形成车辙的外在因素。
2.1.3 车辙形成的过程及危害
(1)车辙的形成过程
车辙的形成主要分为以下三个阶段,如图2.3所示
①开始主要是压密过程。沥青路面主要组成部分有沥青胶浆,空气,松散的混合物。路面在被车辆的挤压中,沥青胶浆进入间隙中,车辙的骨架形成。特别是在高温或者高负荷的车载作用下,形成的更快。
②然后是混合料进行塑性流动。高温下的混合料处于半固体状态,通过塑性流动,混合料填充了空隙。
③矿质骨料的重排和破坏。当路面车辆荷载的程度超过路面的承受能力时,路面的结构和骨架会被破坏。
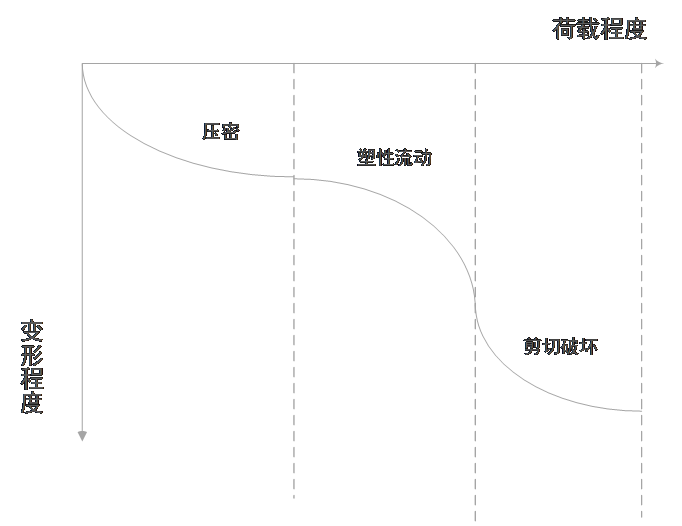
图2.3 车辙形成的示意图
(2)车辙的危害
现如今,最大的马路病害就是车辙了,车辙不仅对司机的安全驾驶有着严重的影响而且对路面的整洁度和美观也有着不小的影响。
①安全危害:当车辙深度较深时,汽车在行驶的时候会左右不平,如果车辆的速度较快,方向盘会不容易控制,很容易发生侧翻,严重影响着司机的驾驶安全性。其次,在雨天的环境里面,车辙处会产生一定的积水,路面更湿滑,而且轮胎带起的水雾会使后车司机的视线受阻,很容易发生追尾事件。
②路容危害:政府越来越重视城市的环境建设,其中道路的美观是最能够反映一个城市的建设环境的。路面的车辙会使平整的路面高低不平,很影响路面的整洁感,也降低着交通的通行能力,造成堵车。
2.2车辙的检测综述
2.2.1 车辙检测方式的演变
随着科学技术的蓬勃发展,车辙的检测方法越来越趋向于自动化,测量的精度和准确度也越来越高,同时还要求在不封路、不停车、不阻碍交通条件下进行。路面车辙的自动检测是路面变形量检测及路面使用性能评价的重要组成部分,车辙检测技术和设备正朝着实时化,高精度、高稳定、智能化、全自动化方向在发展。
最刚开始的测量是人工拿着直尺衡量车辙的深度,这种测量方式受人工的影响较大,造成的误差也很大,而且效率低下。现在的测量方式多为自动化方式,其原理就是用一系列的激光,红外线等传感器来检测路面车辙情况。
2.2.2 车辙检测原理
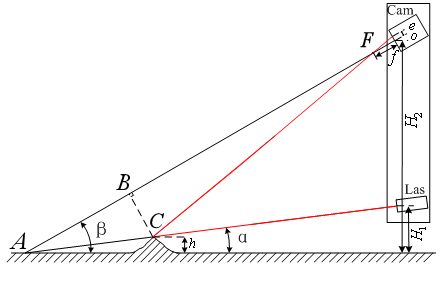
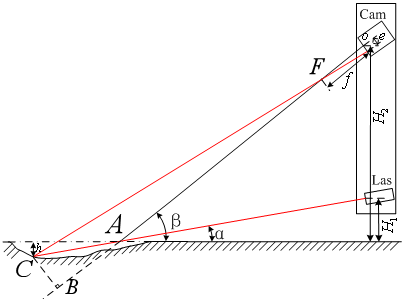
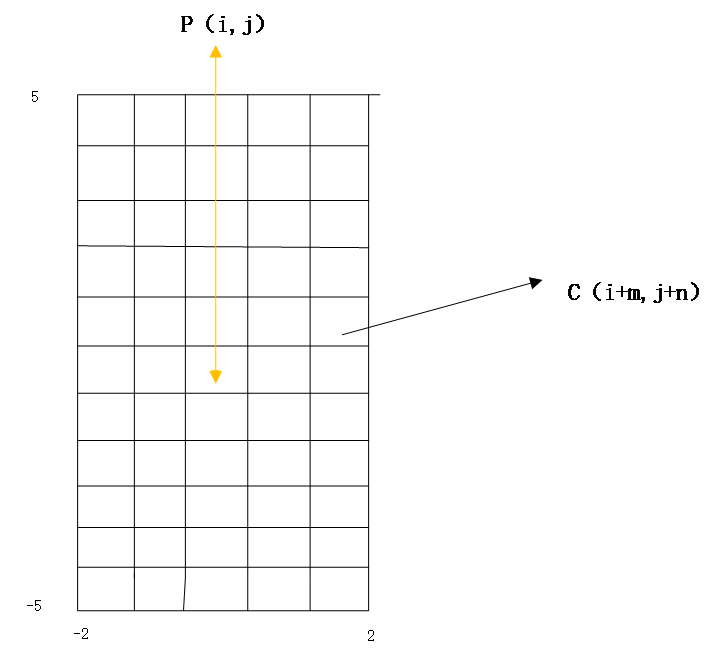
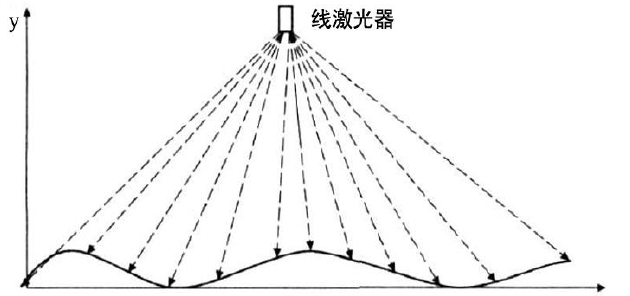
本次采集是利用线激光技术采集车辙的原始图像。线激光主要是利用激光作为光源,向路面发射极窄的光线,打在车辙上面时,光线会扭曲,线激光采集路面的投影图如图2.4所示。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: