三相无刷直流电机的一种低成本驱动方式外文翻译资料
2022-07-27 10:44:42
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
三相无刷直流电机的一种低成本驱动方式
H.K.Samitha Ransara and U.K.Madawala
新西兰奥克兰大学电气和计算机工程系
Email:shew023@ec.auckland.ac.nz,u.madawala@auckland.ac.nz
摘要——本篇文章提供了一种新颖的驱动结构,可以使三相无刷直流(BLDC)电机不需要中间链路电容器。本文提出的这种电机驱动使用了一种独特的六步脉冲宽度调制(PWM)开关算法来驱动无算直流电机运行。这种驱动系统使用带有SimPower Systems 的 Matlab/Simulink工具箱里的一台320W无刷直流电机进行模拟。由于这种独特的开关算法,电机可以工作在速度控制模式或者是磁力扭转模式。本文阐述了开关算法的导出,以及介绍了通过仿真来生效驱动系统的Matlab/Simulink模型。仿真结果从理论上显示这种电机驱动系统和现存的技术是可相比较的。除此之外,此种电机驱动系统不仅易实现,而且由于没有中间链路电容器所以成本较小。因此这种技术对于在不考虑扭矩波动的情况下,将会是一种更有吸引力的无刷直流电机驱动方式。
Ⅰ.前言
如今永磁同步电机和直流无刷电机在工业的应用中越来越广泛。他们不使用电刷来进行换向,而是通过一系列的电力电子旋转和转子定位信息以电子方式执行的。因此永磁同步电机和直流无刷电机有一些先天的优点,例如低维修率,高使用寿命,高效率以及较低的运行噪声。永磁同步电机和直流无刷电机的励磁是由位于转子中的永磁体提供。因此,这些电机展现出高能量密度,和较高的扭转速度的特性。在实际情况下具有转子位置反馈的电力电子转换器被用来驱动永磁同步电机和直流无刷电机。一般来说,电力电子转换器是以下两种中的一种。1)间接转换器——输入通过中间链路电容器进行缓慢的调整,通过一系列的电力电子开关进行切换。2)直接切换——输出通过电力电子开关对输入分段采样直接被综合。由于间接转换器具有易实现易控制的特点,在工业应用中间接转换器比直接转换器更加常用。间接切换器的中间链路电容器一般微电解电容。间接转换器使用寿命和电解电容的特性与周围环境的温度有关。此外电解质原料的种类,运行环境的温度以及储存温度对电解电容来说是影响最大的老化因素。因此
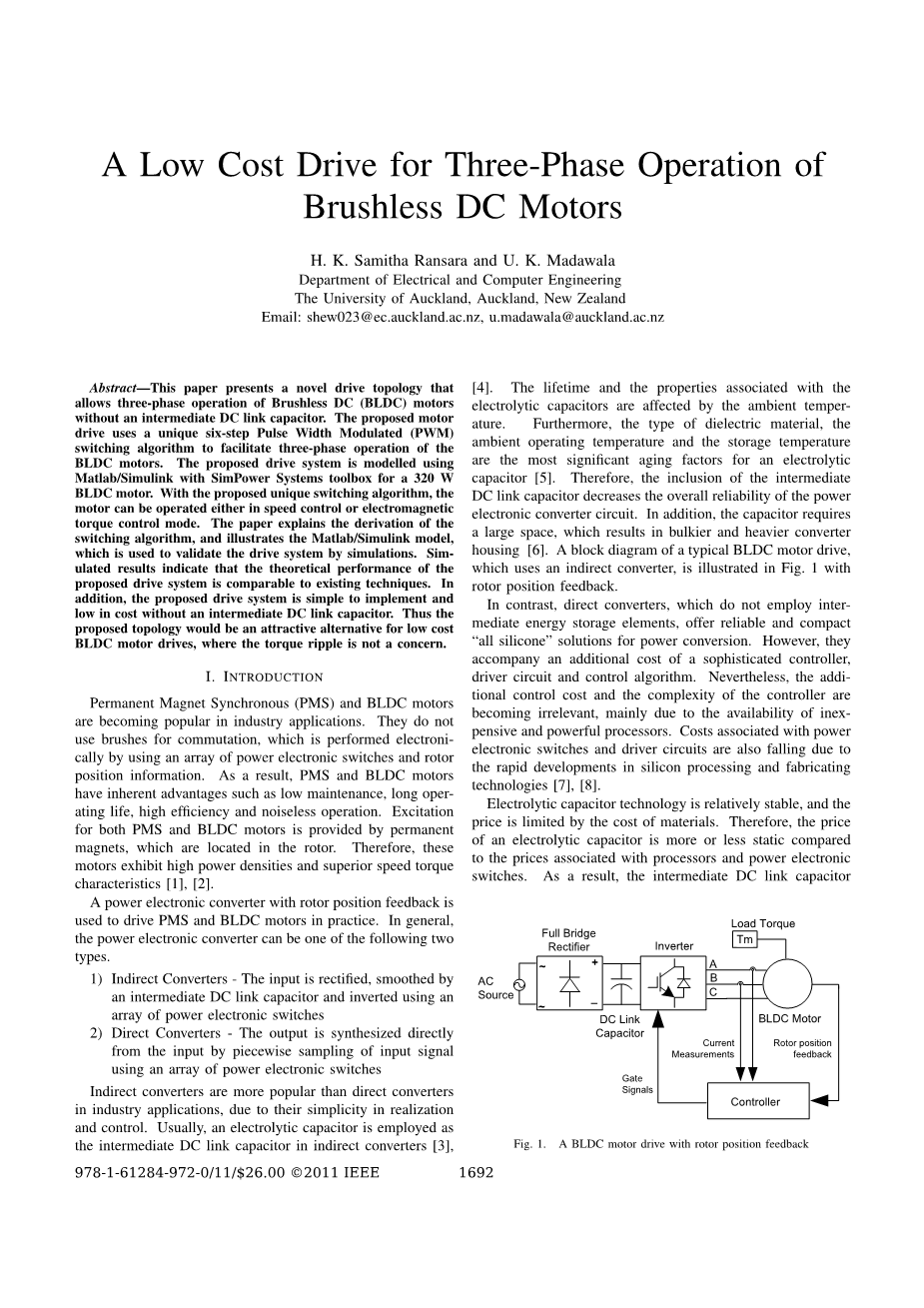
中间链路电容器的内含物降低了整个电力电子转换器电路的稳定性。此外,电容器需要较大的空间,这将导致转换器需要体积庞大和重量更大的转换器外壳。使用间接转换器和转子位置反馈的典型直流无刷电机驱动器的框图如图1所示。
相比之下,不使用中间能量存储元件的直接转换器为功率转换提供可靠且紧凑的“全硅”解决方案。然而,他们伴随着复杂的控制器,驱动电路和控制算法等开销。然而由于廉价和强大的处理器的应用,额外的控制花费和复杂的控制器正在逐渐被淘汰。电力电器转换器和驱动电力的花销减少由于硅工艺和制造技术的迅速发展。
电解电容技术相对的稳定,价格受原材料花费的限制。因此一个电解电容的价格或多或少更加稳定相比较于处理器和电力电子转换器。因此相比于其他电路元件中间链路电容器正在成为电机驱动系统种最昂贵和脆弱的原件。因此直接转换器正在成为一种更加吸引人和廉价可靠的方式相比较于间接转换器。
图1.一种基于转子位置反馈的直流无刷电机的驱动
三相无刷直流电机通常由通过由霍尔效应传感器信号获得的转子位置信息的六步换向模式驱动。直流无刷电机的相绕组一次通电两次以连续的方式产生电磁转矩,使电动机转动。尽管在换向间期两相操作会产生扭矩峰值,但是这种驱动方式可以满足大多数工业和实际需求。对于三相无刷直流电机的运行,六步换向法需要产生方波波形来模拟三相正弦电流输入。相比于使用两相运行的一个直流无刷电机,使用三相运行的无刷电机预期会有更好的速度和扭矩反馈。
在本篇文章提出了一种新颖的拓扑机构,这种结构有助于实现一种三相直流交换器,这种交换器使使直流无刷电机的三相操作成为可能。这种拓扑结构之所以新颖是因为省去了中间链路电容器并且使用了独特的PWM开关算法,以此来控制直流无刷电机的速度和电磁扭矩。随着直流无刷电机直接由单相电源驱动,我们对电机的速度和扭矩波纹有更高的期望。然而,随着三相直流无刷电机操作的提出,发现电机的速度和扭矩波动显著提高相比较两相操作。
本文所介绍的直流无刷电机驱动是由带有SimPower Systems 工具箱的Matlab/Simulink 仿真系统进行模拟和生效的。分别对速度和电磁扭矩控制两种模式进行仿真。从仿真中获得可比较的结果,并进行详细讨论。
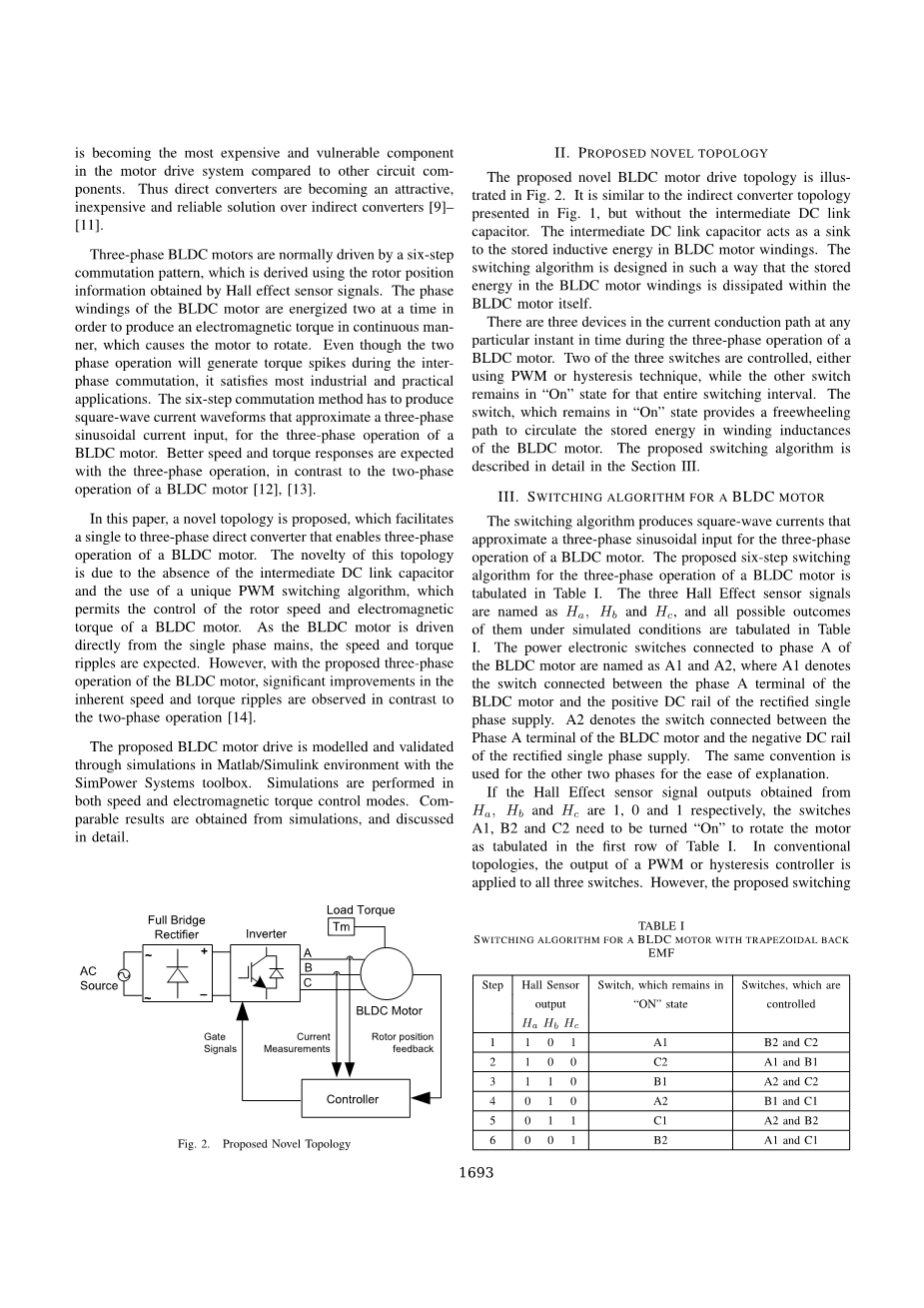
图2.新型无刷直流电机驱动
Ⅱ.提出的新型拓扑结构
图二显示出了本文所提出的新型的直流无刷电机驱动的拓扑结构。和图一所显示的间接转换器的拓扑结构类似,但是没有了中间链路电容器。中间链路电容器的作用是用来存储直流无刷电机线圈的感应能量。本文设计的开关算法是使直流无刷电机线圈的感应能量由电机本身消耗。在无刷直流电机三相操作的任何特定的时刻电流传输的路径上都有三个器件。三个开关中的两个是被控制的,其中一个要么是使用PWM技术要么就是滞后技术,另一个在整个切换时间间隔保持开的状态。保持开启状态的电感线圈提供了随心所欲的途径来传播无刷直流电机磁感应线圈中的能量。本文所提出的开关算法将在第三节详细讨论。
Ⅲ.直流无刷电机的一种开关算法
这种开关算法产生方波电流来近似三相正弦输入来控制三相直流无刷电机。所介绍的三相直流无刷电机的六步开关算法已制成表格在表格Ⅰ中显示。三种霍尔感应器信号Ha,Hb和Hc,以及所有在仿真条件下所有可能的输出都在表格Ⅰ中显示。连接直流无刷电机的相位A电力电子开关分别为A1和A2,A1指示出直流无刷电机相位A终端和单相正电源修正信号。A2指示出直流无刷电机相位A终端和单相负电源修正信号。为了方便解释,其他两种相位也用了相同的约定。
如果从Ha,Hb和Hc获得的霍尔效应感应器的输出分别为1,0和1,那么开关A1,B2和C2需要打开来驱动电机运转如表一的第一行。为了更符合拓扑学习惯,PWM的输出或者延迟控制器被应用到三个开关上。然而,这种所介绍的开关算法,当A1在整个开关步骤时只应用PWM或者延迟控制器B2和C2开关上。当B2和C2在关闭状态时单向转动的存储感应能量的路径由B1和C1有关的非平行二极管提供。在整个切换间隔A1始终处于开的状态,使电机线圈B和C存储的能量由电机自己本身消化。
表Ⅰ
具有梯形背部电动势的直流无刷电机开关算法
正如表Ⅰ第二行所显示的,如果霍尔效应感应器从Ha,Hb和Hc的输出信号分别是1,0,0那么A1,B1和C2需要切换到开的状态来产生正的扭矩。在整个开关步骤,本文所介绍的开关算法应用到PWM或者延迟控制器输出只是开关A1和B1当C2始终保持在开的状态。当A1和B1在关闭状态时,单向转动的存储感应能量的路径由A2和B2有关的非平行二极管提供。当C2在整个切换间隔保持开的状态,使电机线圈A和B存储的能量由电机自己本身消耗。
如表Ⅰ下一步的切换步骤和步骤3到6的步骤一致。根据所描述的切换算法,所有可能的霍尔感应器的输出在图3中显示出。
图.3. 梯形后背感应电动势的直流无刷电机的霍尔和开关信号
Ⅳ仿真以及结果
这种直流无刷电机驱动的拓扑结构由带有SimPower Systems工具箱的Matlab/Simulink 仿真环境进行模拟来测试此种驱动的性能。内置的SimPower Systems工具箱的模型用来构建仿真模型。 使用成熟的Simulink模型,速度和磁扭矩控制技术通过仿真实现。
代表霍尔效应感应器的输出信号从Simulink自带的直流无刷电机的输出总线获得。这些信号被送到Simulink内的子系统,来确定根据表Ⅰ开关算法必须被控制的电力电子开关。被用来仿真的直流无刷电机参数在附录Ⅰ中显示。完整的仿真图标在图4中显示。
- 速度控制
合适的速度控制器设计对于直流无刷电机平稳状态和短暂特性的驱动来说是非常重要的。直流无刷电机驱动速度可以使用闭环控制系统进行控制,通过比较实际速度和参考速度来产生速度错误信号。速度错误信号传送到基于比例集成控制器的速度管理器来导出和动态的调整电力电子开关的周期循环。
图.5. 速度控制器结构示意图
图.5. 直流无刷电机驱动的Matlab/Simulink仿真结构图
模拟的控制转子速度的比例积分控制器的机构示意图见图5。电力电子开关的周期调整,通过比较比例控制器的20Khz频率的三角载波输出来获得。模拟的比例积分控制器比例增益和积分增益通过经验从观察仿真的电机速度反馈,通过实验和错误来优化数值。
仿真的速度控制的结果在图6和图7中显示。电流和背部电动势波形在图6中只显示了一个阶段。逐渐减少的峰值Vpk为15 的替代带电压波形(Vs)在图6中示出,以此来代替实际的峰值Vpk为325的整流电压波形,为了更加容易的和被用来模拟的输出波形进行比较。和预期一样,由于V过零点定子电流波形偏离理想情况。
对于本次仿真,速度的参考值设置为800r.p.m,从图7可以明显看出系统在t=0.03s后大约8r.p.m转速脉动,系统趋于稳定。转速脉动是由于Vs的过零点。但是这种转速脉动和参考速度来比是非常低的数值并且对直流无刷电机的影响可以忽略不计。
图.6.与一个按比例减少的供电压相比的相位A电流和背部电动势波形
图.7.转子速度反馈
B.扭矩控制
直流无刷电机的输出磁力矩和可以被闭环控制系统控制的定子电流的大小成直接的比例关系。定子电流错误,代表转子错误可以通过直流无刷电机定子电流的测量值和当前电流的参考值进行比比较获得。计算得出的电流错误传送到比例积分控制器来减少电流值使其达到可以接受的数值。控制器的比例和集成增益通过仿真观察直流无刷电机定子电流和通过实验和错误优化的数值来获得。正如在速度控制器里,频率为20Khz的三角载波来产生PWM开关信号。模拟的控制无刷直流电机定子电流的比例积分器的结构示意图见图8。
仿真结果在图9和图10中显示。电流和背部电动势波形在图9中只显示一个阶段。逐渐减少的峰值Vpk为15 的替代带电压波形(Vs)在图6中示出,以此来代替实际的峰值Vpk为325的整流电压波形,为了更加容易的和被用来模拟的输出波形进行比较。在图8显示的比例积分控制器参考电流设置为1.8安培,根据在表Ⅰ显示的开关算法,开关控制器的输出应用到电力电子开关。正如预期,定子电流波形偏离理想值因为Vs的过零点。
在图10中显示的,观察到的扭矩的脉动在稳定的状态,这是因为Vs的过零点所致。
图.8. PWM 开关信号的生成
C. 滞环控制
滞环控制器被设计用来控制定子电流以及提高电机磁扭矩的输出。模拟的滞环控制器的模拟图在图11中显示。与比例增益控制比他提供快速的响应。控制器维持定子电流在预先设定的关于参考电流值的磁滞边界。输出的仿真的转子响应和从比例积分控制器在稳定状态的响应相似。
图.9.与一个按比例减少的供电压相比的相位电流和背部电动势波形
图.11.滞环控制器
Ⅴ.结论
一种新颖和低成本分应用在三相直流无刷电机的拓扑结构已经介绍完了。这种拓扑结构的新颖在于除去了体积较大的中间链路电解电容器。除此之外,使用独特的PWM开关算法可以控制直流无刷电机的转子速度和直流无刷电机的磁扭矩。
本文所介绍的驱动系统已经在带有SimPower Systems 工具箱的Matlab/Simulink 环境进行仿真和模拟。仿真结果显示此种驱动系统和已经存在的驱动技术的效果不相上下,并且此种驱动算法在不考虑扭矩脉动的情况下可能是更加吸引人的低成本驱动算法。初除此之外,在长时间的运行中,由于此种算法除去了中间链路电容器,所以更加可靠。直流电机是指能将直流电能转换成机械能(直流电动机)或将机械能转换成直流电能(直流发电机)的旋转电机。它是能实现直流电能和机械能互相转换的电机。当它作电动机运行时是直流电动机,将电能转换为机械能;作发电机运行时是直流发电机,将机械能转换为电能。相比于步进电机来说,直流无刷电机结构紧凑,体积小,造型美观,承受过载能力强。而且能耗低,性能优越,通用性强,使用维护方便,维护成本低。无刷直流电机既保持了传统直流电机良好的调速性能又具有无滑动接触和换向火花、可靠性高、使用寿命长及噪声低等优点,在航空航天、数控机床、机器人、电动汽车、计算机外围设备和家用电器等方面都获得了广泛应用。
感谢
作者感谢Wellington Drive Technologies 有限公司以及Technology New Zealand的支持。
附录Ⅰ
表Ⅰ
用于仿真的直流无刷电机参数
参考文献
[1
全文共8732字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[144411],资料为PDF文档或Word文档,PDF文档可免费转换为Word



