数据驱动的工业机器人装备运行控制动态优化方法研究毕业论文
2020-08-13 20:49:05
摘 要
工业机器人作为现代制造业自动化装备,在工业制造系统中得到了广泛的应用。同时,为了获得最大化的产量和利润,全天候运行这样的制造系统是很常见的。因此,每个机器人运行周期能量消耗的减少,都会对总的能量消耗产生很大的影响。本设计运用与模型无关的优化方法,通过调整沿着给定路径的机器人的加速度和速度来研究节省能耗的可能性。整个设计通过迭代动态规划(IDP)以及从仿真获取能耗数据来实现。
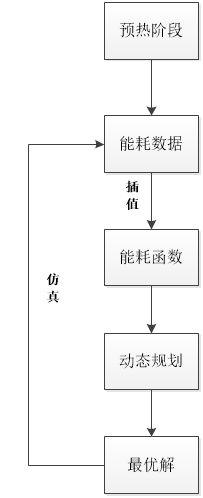
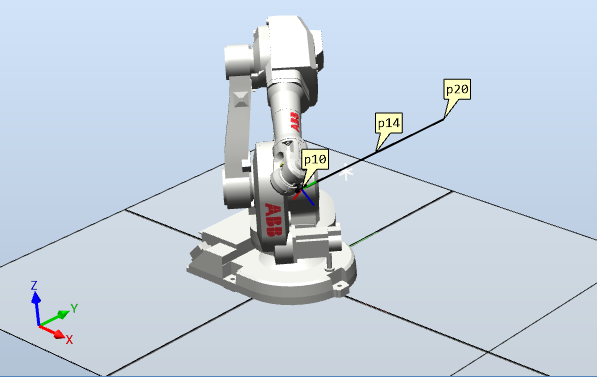
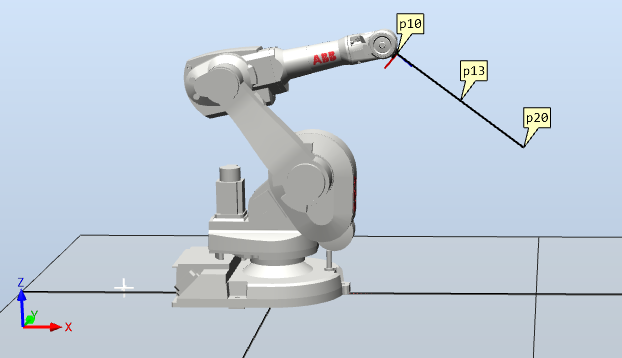
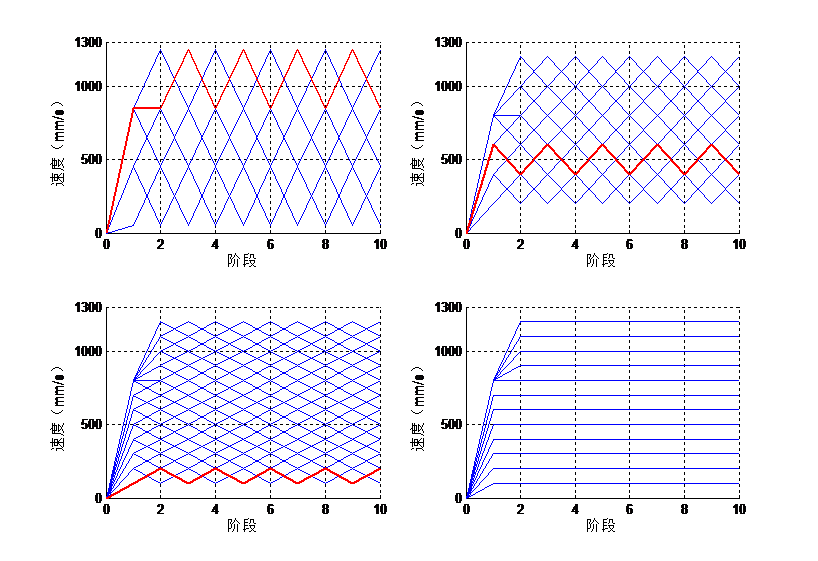
本设计为ABB工业机器人进行轨迹规划,并且迭代动态规划(IDP)方案通过在ABB RobotStudio软件中进行离线编程来实现。在预热阶段,对于一条给定路径,通过改变固定点的速度和加速度进行仿真,从而获取能量数据。为了获取足够的初始能耗数据,不同的速度和加速度模式在预热阶段进行了测试。然后,在获取了能耗数据之后,通过Matlab对能耗数据进行插值,得到了能耗函数。最后是迭代动态规划阶段,通过得到的能耗函数,运用动态规划方法,得到一条能量最优的路径,然后对这条最优路径进行仿真,将得到的能耗数据添加到之前创造的能耗函数中,再进行动态规划,得到最优轨迹,这个过程迭代多次。
最后,本设计使用两条不同的路径对设计方法进行了测试,其中水平路径的能耗优化约30%~50%,而对角路径的能耗优化约30%~60%。
关键词:ABB工业机器人;能耗优化;迭代动态规划;模型无关
Abstract
Industrial robots as a modern manufacturing automation equipment has been widely used in the industrial manufacturing system. At the same time, in order to maximize production and profit, it is not uncommon to run such a manufacturing system around the clock. Therefore, a small decrease of the energy consumption per robot cycle can make a big difference to the total energy consumed. This project investigates the possibility of saving energy by adjusting the rate of acceleration and speeds of the robot along a given trajectory by utilizing a model-free optimization method. The entire design is implemented by Iterative Dynamic Programming (IDP) and from the simulation of energy data.
This design makes a trajectory planning for ABB industrial robot, and Iterative Dynamic Programming (IDP) scheme is implemented by off-line programming in ABB RobotStudio. In the warm-up stage, for a given path, we can get the energy consumption data via simulation by changing the fixed point speed and acceleration. In order to obtain sufficient initial energy consumption data, different speed and acceleration modes were tested during the warm-up stage. Then, after obtaining the energy consumption data, the energy consumption data is interpolated by Matlab, and the energy consumption function is obtained. At last, it is the IDP stage. Through the energy consumption function, the DP method is used to obtain an optimal trajectory of energy. Then, the optimal path is simulated and the energy consumption data of the optimal trajectory is added to the energy consumption function, and the DP get another optimal trajectory. The process iterates many times.
Finally, the design uses two different paths to test the design method, where the horizontal path optimizes the energy consumption about 30% to 50%, while the diagonal path optimizes the energy consumption about 30% to 60%.
KeyWords: ABB industrial robot; Energy consumption optimization; Iterative Dynamic Programming; model-free.
目 录
摘要 I
Abstract II
第1章 绪论 1
1.1 课题研究的目的及意义 1
1.2 国内外研究现状 1
1.2.1 国内研究现状 2
1.2.2 国外研究现状 2
1.3 预期目标及章节安排 2
第2章 动态优化方法原理分析 4
2.1 机器人轨迹规划 4
2.2 动态规划原理概述 5
2.2.1 动态规划基本概念 5
2.2.2 动态规划处理过程 6
2.3 迭代动态规划 8
2.4 关于RobotStudio 8
2.4.1 RobotStudio简介 8
2.4.2 RobotStudio的限制 9
第3章 动态优化方法的实现 10
3.1 动态规划模型 10
3.1.1 能耗函数 10
3.2 迭代动态规划 11
3.3 预定义阶段 12
3.3.1 测试的路径 12
3.4 预热阶段 13
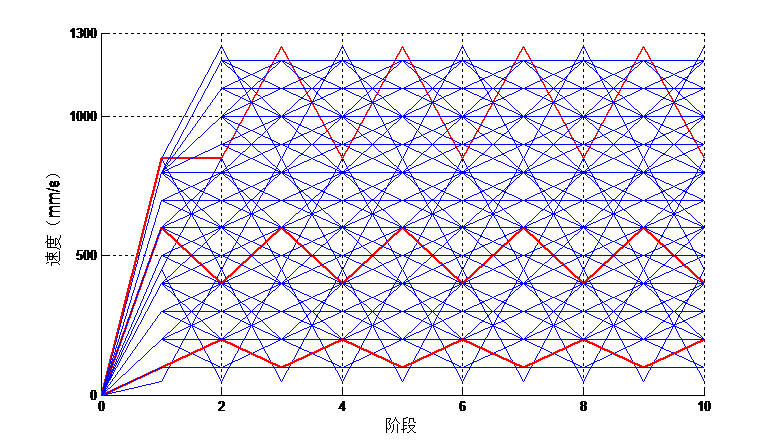
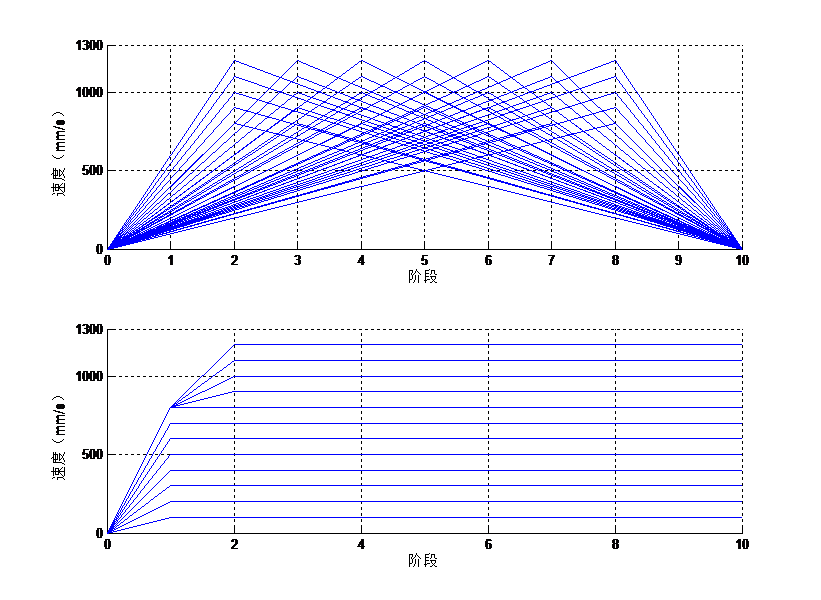
3.4.1 锯齿形速度模式 14
3.4.2 三角形速度模式 15
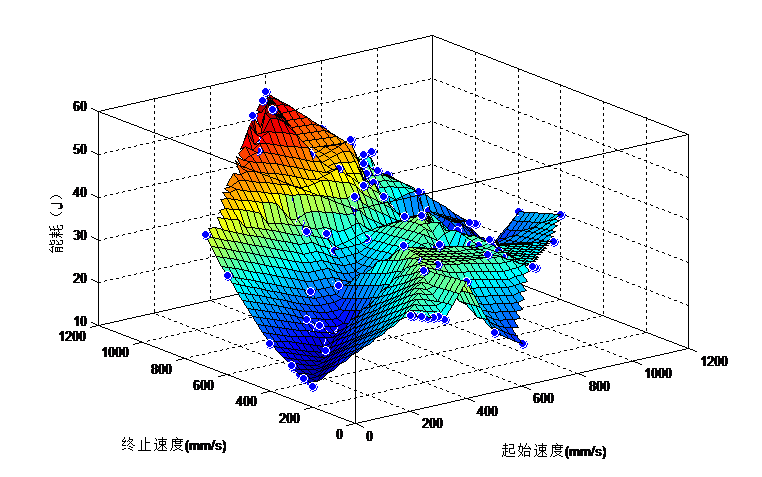
3.4.3 能耗函数 16
3.5 迭代动态规划阶段 18
3.5.1 水平路径 18
3.5.2 对角路径 20
第4章 总结与展望 23
4.1 总结 23
4.2 展望 23
参考文献 24
致谢 25
第1章 绪论
1.1 课题研究的目的及意义
随着工业4.0的推出,通过将数字空间和物理空间相结合的手段,实现制造业向智能化转型。制造业的发展对制造业的智能化水平要求越来越高。虽然我国近年来制造业得到了持续快速发展,但是在制造装备的资源利用效率方面仍然与世界先进水平存在明显差距,由此造成的问题也制约着我国制造业的发展。因此,实现制造装备的节能降耗,便成为了人们亟待解决的问题。
工业机器人是集机械、电子控制、计算机、传感器和人工智能等多学科技术于一体的现代制造业自动化装备。工业机器人能够代替和协助人类完成复杂甚至难以完成的工作,工业机器人工作过程稳定可靠,具有效率高、重复精度好、灵活性好等特点。随着计算机科学技术、传感器技术以及人工智能等多个研究领域技术的快速发展,对工业机器人领域研究逐渐深入,工业机器人的智能化程度也逐渐提高,同时也进一步提高了工业生产产品的合格率,降低了生产成本,提高了制造系统的生产效率。但是工业机器人在工作过程中功率配置高,伺服电机需要消耗大量能量,所以能够在不降低工业机器人的工作效率的条件下降低其工作能耗就变得尤为重要。通过对工业机器人建立能耗数学模型,研究出优化工业机器人能耗的动态方法,从而能有针对的降低能耗,对工业机器人在制造业中的发展具有重大意义。
几乎所有的自动化生产过程都是使用工业机器人作为主要部件来进行工业生产,所以减少能耗就成了发展绿色生产系统的焦点问题,减少能耗也会相应的减少生产成本和CO2的排放。工业机器人的能耗控制和减少,将会不断改善企业的能源利用率,使工业生产对能源的利用更加合理、科学、智能。本设计研究工业机器人运行控制参数如运行速度、加速度对工业机器人能耗的影响,对于一条给定路径,通过优化工业机器人运行控制参数达到降低工业机器人能耗的目的,实现制造装备的节能降耗。
相关图片展示: