基于上肢表面肌电信号的虚拟人机交互系统设计开题报告
2020-02-18 18:26:51
1. 研究目的与意义(文献综述)
1.1 研究目的及意义
随着信息化时代的到来,计算机、网络、通信等技术得到显著的进步,通过键盘、鼠标向计算机输入信息的交互方式已成为人机通信的瓶颈,不足以满足人们日益增长的人机交互需求,而虚拟现实技术的诞生和发展,使这种限制变得更加明显。因此不断寻找新型有效的交互技术成为了时代的迫切需要。
人体手势动作包含丰富的信息,比如聋哑人之间可以通过哑语进行交流,军事行动过程中也有手语的身影。因而手势识别成为近年来人机交互研究的热点。这一形式的开拓,使得人机交互更加方便快捷。
2. 研究的基本内容与方案
本文以将表面肌电信号作为一种新型的人机交互方式为背景,通过人体上肢运动实现对虚拟飞机的运动控制。利用hill模型分别计算得到运动过程中的肌肉力,搭建虚拟飞机游戏系统,实现肌电信号处理模块与虚拟系统的数据通信进而实现人与虚拟环境的实时友好交互,展示肌电控制的可行性及其在人机交互中的应用前景。
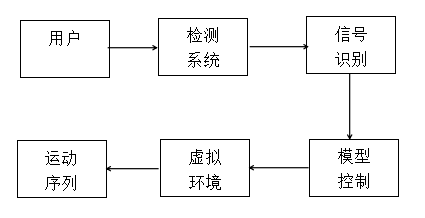
本次设计是利用从人体前臂采集到的 semg 信号对手势动作进行分类识别,然后利用识别结果控制虚拟环境中的虚拟飞机进行三自由度的飞行。系统原理框图如图 1 所示,整个系统由检测系统模块、信号识别模块、模型控制模块和虚拟环境模块四个部分构成。检测系统模块根据用户所做的不同的手势动作从人体上肢肌肉获取 semg 信号,经预处理后送入计算机中。信号识别模块定时地对计算机采集卡中的手势emg 信号数据进行读取,并完成对它们的识别。模型控制模块定时接收识别结果,并根据不同的识别结果向虚拟环境传输不同的命令。虚拟环境模块则根据模型控制模块提供的命令驱动虚拟飞机完成不同自由度的飞行任务,实现整个系统的交互。
3. 研究计划与安排
第1-3周:查阅相关文献资料,明确研究内容,了解研究所需理论基础。确定方案,完成开题报告。
第4-5周:熟悉掌握基本理论,完成英文资料的翻译,熟悉开发环境。
第6-9周:编程实现各算法,并进行仿真调试。
4. 参考文献(12篇以上)
[1] nacpil e j , zheng r , kaizuka t , et al. implementation of a semg-machine interface for steering a virtual car in a driving simulator[c]// international conference on applied human factors amp; ergonomics. springer, cham, 2017.
[2] medical amp; biological engineering amp; computing, 2017, 55(10):1809-1818. jiateng h , yingfei s , lixin s , et al. a pilot study of individual muscle force prediction during elbow flexion and extension in the neurorehabilitation field[j]. sensors, 2016, 16(12):2018-.
[3] yinfeng fang , et al.a multichannel surface emg system for hand motion recognition [d].international journal of humanoid robotics,march 2015



