基于神经网络的气动肌肉自适应滑模控制开题报告
2020-02-18 18:26:48
1. 研究目的与意义(文献综述)
| 1.1 研究目的及意义 气动肌肉(PAMS)是一种新的驱动器,具有高功率/具有高功率/重量比、高功率体积比、轻重量和固有顺应性的优点重量比、高功率体积比、轻重量和固有顺应性的优点。同时拥有与人体骨骼肌相似的特性,且使用过程中风险低,这使其非常适用于康复机器人中。 然而由于橡胶管的固有特性、空气的可压缩性以及管与护套之间的摩擦,气动肌肉具有很高的非线性和时变特性。因此很难对气动肌肉进行精确建模。为此,研究人员提出了多种控制策略。变结构控制(VSC)是一种基于模型的自适应控制策略,对非线性和时变特性引起的扰动和不确定性具有鲁棒性。许多研究人员采用VSC控制PAMS。但是变结构控制需要一个相对精确的模型,因为用一个包含太多不确定性的模型来设计一个稳定的控制器是很困难的。此外,变结构控制中的控制信号在控制过程中会产生颤振,可能会刺激系统的未建模特性。这就降低了VSC控制器的稳定性。 RBF网络能够逼近任意的非线性函数,可以处理系统内的难以解析的规律性,具有良好的泛化能力,并有很快的学习收敛速度,已成功应用于非线性函数逼近、时间序列分析、数据分类、模式识别、信息处理、图像处理、系统建模、控制和故障诊断等。 1.2 国内外研究现状 为了实现基于模型的气动肌肉系统控制,甚至力控制建立控制对象的数学模型是必要的。近年来,气动肌肉的特性和建模得到一些研究人员的分析和研究。如 Shulte首先分析了气压与气动肌肉力之间的关系。随后收缩力与气动肌肉几何结构相关的复杂理论模型也逐渐得到探索和建立,即模型中相应的输出力与输入气压、气动肌肉初始半径、长度、编织网角度、编织线长度以及纤维编织线缠绕圈数等几何参数具有某种函数关系。Chou和 Hannaford通过气动肌肉长度力之间的实验描述和分析了气动肌肉静态特性。Caldwell等在考虑气动肌肉几何参数与气动肌肉模型之间的数学模型关系时,还考虑了气动肌肉两端端盖表面积/直径对气动肌肉模型/输出力的影响。 Klute Hannaford提出了非线性的 Mooney-Rivlin数学模型。由骨骼肌的生物力学模型的启发, Repperger等修正Hill肌肉模型得到气动肌肉的仿生模型。生物肌肉与气动肌肉都是通过收缩来产生输出力,随着气动肌肉内部气压的增加,其模仿生物肌肉的方式径向膨胀而产生径向收缩力。 Reynolds等根据这一现象提出了一种三元素模型75。此外还有一些通过模糊或时间序列的方法来建立气动肌肉模型,但是这使得模型没有明晰的物理表述。 目前,专家控制方法在非线性系统控制中得到了广泛的应用。模糊逻辑在PAM控制中得到了应用。Balasubramanian等人通过从系统中获取输入/输出数据,采用模糊逻辑对PAM的逆动力学进行建模并利用逆动力学模型预测前馈压力,以消除跟踪误差并获得更好的整体稳定性。Nuchkrua等人开发了混合控制器,如将模糊逻辑与PID结合。Chang等人将模糊逻辑与滑模控制结合。Leephakpreeda等人模糊逻辑和神经网络结合。Chandrapal、Chang等人采用自组织方法在线修改模糊规则,以提高控制器处理系统动态变化的能力。
|
2. 研究的基本内容与方案
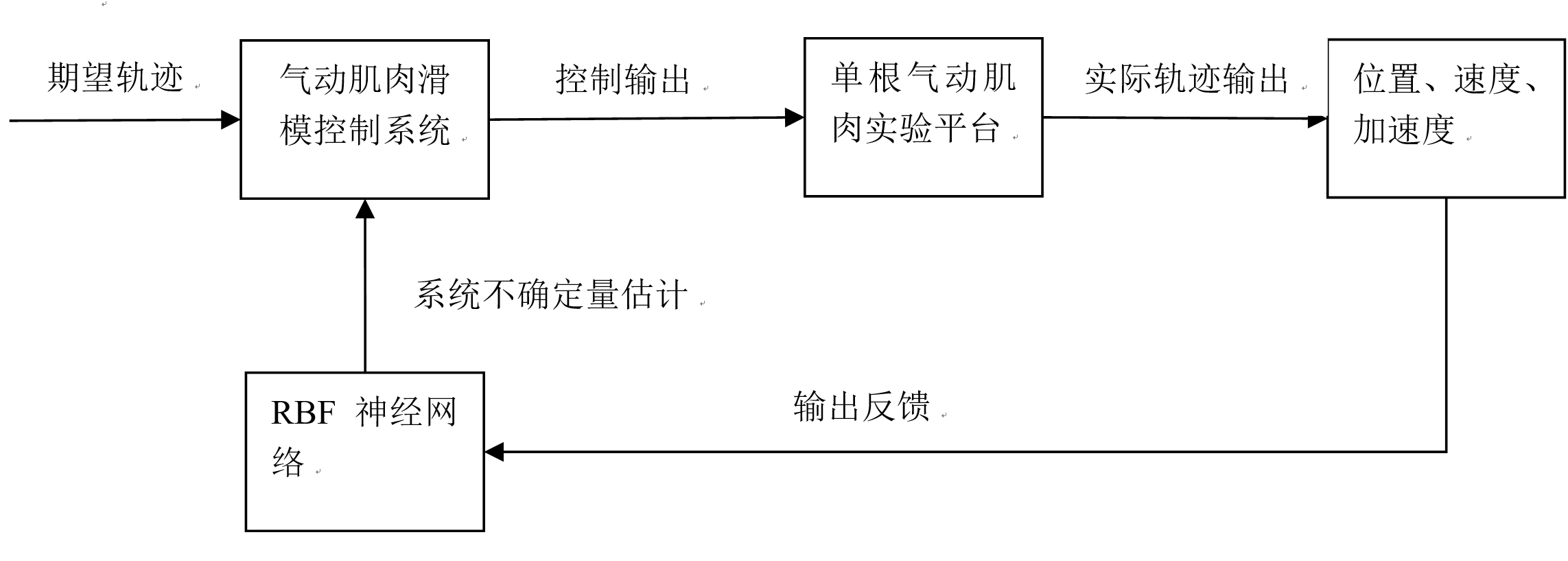
| 本文主要研究FESTO气动肌肉系统的高精度位置跟踪控制。查阅相关文献并采用相对简单的三元素(收缩元、弹性元以及阻尼元)经验模型来分析气动肌肉的动态特性。在建立气动肌肉模型的基础上,通过滑模控制(Sliding ModeControl, SMC)来验证气动肌肉建模的有效性。由于在实际的气动肌肉控制系统中,不可避免的存在建模误差、摩擦、未知干扰等各种不确定项,因此本文中加入RBF神经网络弥补三元素经验建模存在的误差,并采用自适应控制算法在线调节神经网络的权值从而实现整体运动机构的高精度运动控制并保证柔顺性。 具体设计流程包括:完成气动肌肉三元素模型的建立,搭建简单的滑模控制及优化算法的simulink仿真平台。建立气动肌肉的三元素动态模型后,通过传统的滑模控制验证模型的有效性;考虑气动肌肉系统中存在的不确定性因素,采用基于RBF神经网络的自适应滑模控制算法,迫近模型中各种不确定项造成的误差,提升跟踪效果,通过Matlab中的Simulink完成系统的建模、控制和仿真并在Labview上位机平台上完成实物测试。
图1 基于神经网络的自适应滑模控制原理框图 |
3. 研究计划与安排
| 第1周—第4周 搜集资料,撰写开题报告; 第5周—第6周 论文开题; 第7周—第12周 撰写论文初稿; 第13周—第15周 修改论文; 第16周 论文答辩。
|
4. 参考文献(12篇以上)
| [1] Yao B, Zhou Z, Liu Q, et al.Empirical Modeling and Position Control of Single Pneumatic Artificial Muscle[J]. 2016, 18(2):86-94. [2] 上肢康复机器人及相关控制问题研究[D]. 华中科技大学, 2012. [3] J. K. Liu, “Sliding Mode ControlDesign and MATLAB Simulation The Basic Theory and Design Method,”2015. [4] J. Cao, S. Q. Xie, and R. Das, “MIMOSliding Mode Controller for Gait Exoskeleton Driven by Pneumatic Muscles,”IEEE Trans. Control Syst. Technol., vol. 26, no. 1, pp. 1–8, Jan. 2018. [5] S. Csikós, S. Balassa, and J. Sárosi,“Fuzzy Control of Antagonistic Pneumatic Artificial Muscle,” Agria Conferenceon Innovative Pneumatic Vehicles - ACPIV, vol. 8, pp. 51–54, May 2017. [6]隋立明,包钢,王祖温、气动肌肉在康复工程中的应用.中国临床康复,2004,8(2320-321. [9]王永骥,涂健.神经元网络控制.北京:机械工业出版社,1998 [13] Huang SN, Tan KK, Lee TH. FurtherResults on Adaptive Control for a Class of Nonlinear Systems Using NeuralNetworks. IEEE Transactions on Neural Networks, 2003,14(3):719-722. [14] D. G. Caldwell, G. A. Medrano-Cerda, and M. Goodwin, "Control of pneumatic muscle actuators, "IEEE Contro l Systems, vol. 15, pp. 40-48,1995. [15] P. Carbonell, Z. Jiang, and D. Repperger, " Nonlinear control of a pneumatic muscle actuator: backstepping VS. sliding-mode, "in Control Applications, 2001.(CCA01). Proceedings of the/ IEEE International Conference on, 2001, pp. 167-172.
|



