气动肌肉驱动的脚踝康复机器人运动控制研究开题报告
2020-02-18 18:26:28
1. 研究目的与意义(文献综述)
1.1 研究目的及意义
我国第六次人口普查结果显示,年龄超过 60 岁的人口已经达到 1.78 亿,约占全国人口总数的 13.3%,这表明我国已经逐步进入老年化社会。老年人在年龄增长过程中,生理机能会出现显著衰退,肢体灵活性也会不断下降,这给他们的日常生活带来了诸多不便。此外,由于各种疾病和交通意外等造成的关节和肌肉损伤的病人正在日益增加,他们的术后恢复慢、恢复效果不佳,这也是困扰着普通百姓以及运动员生活的严峻问题。
气动肌肉是一种与人类肌肉输出特性类似的柔性气动驱动器件,它具有质轻、输出功率/自重比大、安全性好、清洁、价格低等优点,其输出力随着收缩位移的增大而减少。由于上述优越的特性,在康复医疗工程领域的相关应用中,气动肌肉具有很好的优势。很多学者研究了气动肌肉在康复医疗领域的应用,提出了多种以气动肌肉作为驱动器的康复医疗机器人。
2. 研究的基本内容与方案
相对于刚性驱动器,柔性气动肌肉驱动器具有柔顺性好、质量轻、输出力/质量比高、刚度可调等优点,将其应用到康复机器人具有众多的优势。本课题拟首先对气动肌肉模型进行研究,在介绍气动肌肉基本结构、工作原理与工作特性的基础之上,利用能量守恒原理获得了气动肌肉的理想模型。由于气动肌肉理想模型与实际存在较大偏差,结合实验方法,利用迟滞模型建立气动肌肉的三元素模型。同时,介绍了脚踝康复机器人实验平台的工作原理、硬件组成,开发了机器人的上位机软件控制系统,分析了机器人的运动学原理,为后续的机器人控制做铺垫。然后研究其驱动的二自由度脚踝康复机器人,建立该机器人的逆向运动学模型。由于气动肌肉的非线性、参数时变以及机器人本身的多输入多输出耦合因素,脚踝康复机器人的控制十分复杂,传统的控制方法很难达到精度要求。本文提出了模型补偿模糊自调节控制器用于机器人的位置控制,最后基于气动肌肉三元素模型设计该机器人的位置控制算法(滑模控制算法等),实现该二自由度脚踝康复机器人的高精度位置控制。
利用开发软件labview、控制器usb7660bd和数据采集卡usb6210实现气动肌肉的建模及其驱动的脚踝康复机器人的实时控制。气动肌肉驱动脚踝康复机器人系统工作原理如图所示。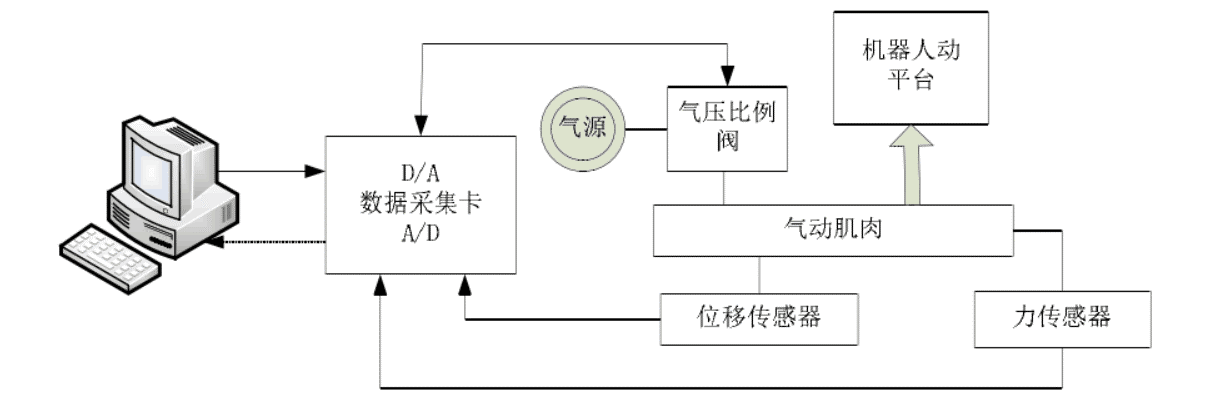
3. 研究计划与安排
第1-3周:查阅相关文献资料,明确研究内容,了解研究所需理论基础。确定方案,完成开题报告。
第4-5周:熟悉掌握基本理论,完成英文资料的翻译,熟悉相关工具软件的使用。
第6-7周:研究气动肌肉的驱动特性,建立气动肌肉的三元素模型。
4. 参考文献(12篇以上)
[1]王斌锐,王涛,郭振武,等.气动肌肉四足机器人建模与滑模控制[j].机器人,2017,39(05):620-626.



