四旋翼无刷无位直流电机驱动电路改进实现毕业论文
2020-05-23 16:22:17
摘 要
四旋翼飞行器属于小型无人飞行器的一种,易于实现垂直起降、空中悬停以及空间六自由度机动,具有国防和商业价值。与普通的固定翼飞行器相比,四旋翼飞行器具有结构简洁、机动性强以及可靠性高的特点,因此在军用和民用领域具有广泛的应用前景。但是由于目前这种飞行器控制比较复杂,技术水平还不够成熟,吸引了国内外研究员的高度关注,成为国际上的研究热点之一。
本文基于对单个无刷无感直流电机驱动电路的改进,拓展成四电机驱动电路,并利用TMS320F28335 DSP芯片控制输出动态PWM波来驱动电路。启动时采用预测换相,并利用启动之后捕获边沿与AD过零点检测进行换相。
本文在硬件方面使用Altium Designer 进行硬件PCB图绘制,联系厂家生产PCB板,并完成PCB板的焊接测试。在软件方面使用CCSv5.3编程环境,采用C语言编程实现了PWM波的输出,进而实现了电机的启动,换相。
关键词:四电机驱动电路 预测换相 PCB绘制焊接
Improvement of four rotor brushless DC motor drive circuit
Abstract
Quad-rotor aircraft is a kind of Micro Unmanned Aerial Vehicle. Profit from its strong proneness to achieve vertical take-off and landing, hovering and six-degree of freedom, the aircraft itself has high value at both national defense and commercial field. Compared with the conventional fixed wing aircraft, the four rotor aircraft has the advantages of simple structure, high maneuverability and reliability, which makes it a broad application prospects in military and civil fields. Nowadays, due to its comparatively complicated control and immature technology, the four rotor aircraft has attracted great attention of researchers from domestic and abroad. Altogether, four rotor aircraft has become a hotspots in the international area.
The article is based on the single brushless sensorless DC motor drive circuit, and expanding into four motor drive circuit, which are using the chip TMS320F28335 DSP to dynamically control the output PWM waves to drive circuit. The prediction of phase change is initiated at the start , and then changed by detecting the capture edge and the zero crossing point of AD .
This article uses the Altium Designer to carry on the hardware PCB drawing in the hardware aspect, contacting factory to produce the PCB board, and completes the PCB board welding test. In the software, using CCSv5.3 programming environment, using C programming language to achieve the PWM wave output, and then achieve the motor starting, phase changing.
Keywords: Predictive conversion phase; Four motor drive circuit; Draw and weld PCB
目 录
摘 要 I
Abstract II
目 录 III
第一章 绪论 1
1.1 课题来源及研究背景 1
1.2 国内外的研究现状 1
1.2.1 国外研究现状 1
1.2.2 国内研究现状 2
1.3 本文所做的工作 2
第二章 无刷无感直流电机驱动电路硬件设计制作 3
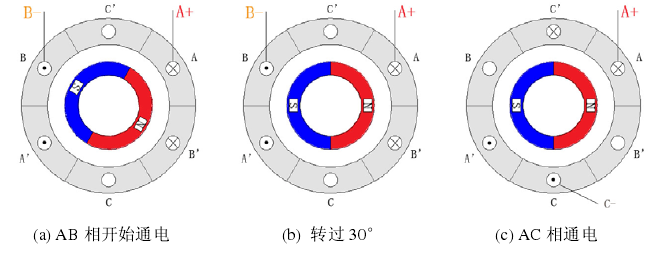
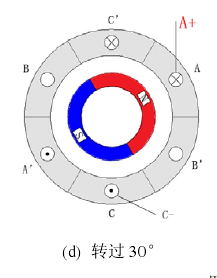
2.1 电机转动和换相原理分析 3
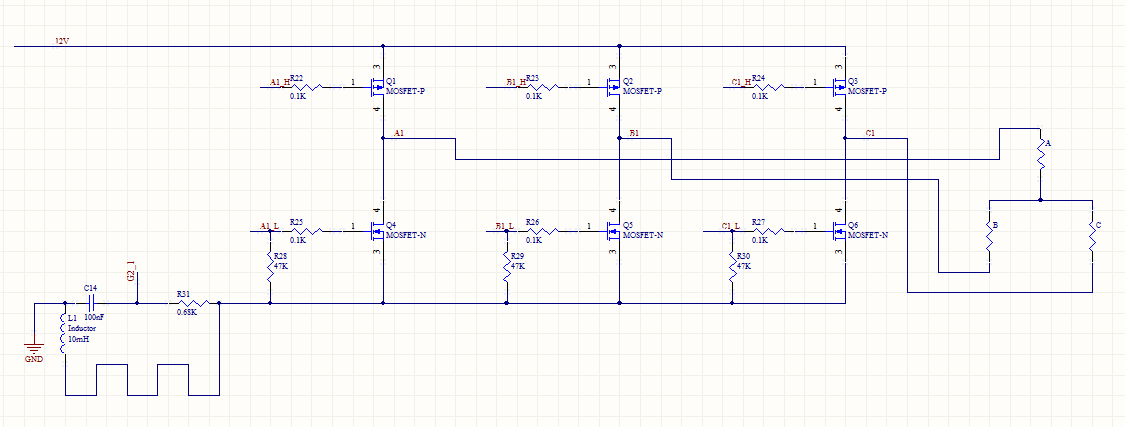
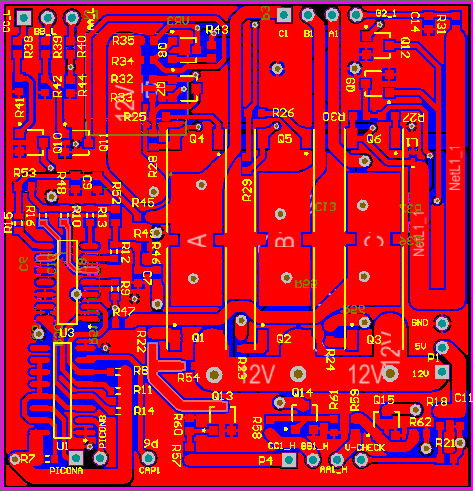
2.2单电机驱动电路PCB设计 7
2.3 TMS320F28335 DSP芯片介绍及管脚分配 8
2.3.1TMS320F28335 DSP芯片各模块功能简介 8
2.3.2 TMS320F28335 DSP管脚分配 9
2.4 四电机驱动电路PCB绘制 14
第三章 无刷无感直流电机软件驱动 16
3.1 PWM波的设置 16
3.2 CAP控制PWM输出与程序设计 19
3.2.1 CAP控制PWM输出 19
3.2.2 CAP控制PWM函数程序流程图描述 20
第四章 无刷无感直流电机启动算法设计 21
4.1 电机驱动电路上电自检程序的设计 21
4.1.1 自检程序原理概述 21
4.1.2 自检程序的设计 22
4.2 无刷无感直流电机启动原理与程序设计 23
4.2.1电机启动原理概述 23
4.2.2 无刷无感直流电机启动函数流程图描述 24
4.3 直流电机过零点换相检测原理与程序设计 25
4.3.1 捕获单元和AD采样检测过零点 25
4.3.2 过零点检测函数流程图 25
4.4 AD转换模块介绍 26
第五章 总结和展望 27
5.1 总结与评价 27
5.2 展望 28
参考文献 29
致 谢 31
第一章 绪论
1.1 课题来源及研究背景
无人飞行器,英文全称为Unmanned Aerial Vehicle,缩写是UAV,是指具备动力系统,不载人的飞行器。四旋翼飞机使用空气产生的动力来抵消飞行器本身的重力,不仅能够实现遥控飞行,还能实现自主飞行。随着科技的飞速进步,无人飞行器领域有了快速的拓展,其在军事以及民用方面都有着广泛的使用,例如:应用于侦测勘察、数据收集、通讯中继等等,通过无人飞行器来完成较为困难、危险、复杂的任务,不仅操作灵活、低成本、 低损耗、 零伤亡、 而且还能够重复使用。
如今,无人机可以分成固定翼无人机和旋翼无人机两类。固定翼无人机是指具有常规固定翼飞机气动布局的无人机,这种无人机使用的固定翼飞机技术水平较高,操控比较方便,如今,已经发展的很成熟了。旋翼无人机是指使用旋翼作为推动飞行的飞行器,由于旋翼无人机智能激动,可以实现垂直起降,并且起降不受场地限制,可以用于完成多种危险、复杂的工作,应用非常广泛,当前,越来越多的国家投入到这种旋翼无人机的研究和生产。
相关图片展示: