基于uArm Swift机械臂书写技术研究毕业论文
2020-04-12 16:46:43
摘 要
机器书写作为近些年来新兴的机器人研究项目,在市面上已经有不少的成果出现,本文在综合了解和分析了国内外机械臂书写研究的基础上,针对机械臂书写的汉字信息获取不方便,软件代码比较冗长的问题,基于uArm Swift Pro机械臂,设计了通过Python编写的机械臂书写程序。首先通过将汉字字库转换成Python字典的方式,使控制系统能较为简便的获取汉字字符的坐标信息,然后将坐标信息转换成电机转动值,驱动机械臂动作。具体研究内容如下:
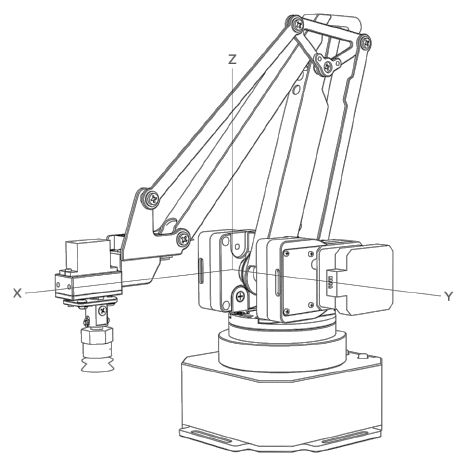
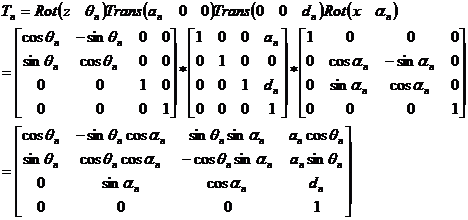
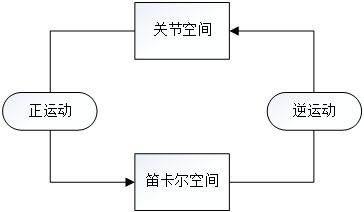
(1)机械臂控制建模。首先研究和分析了机械臂建模的理论基础,并确定使用D-H参数法来对机械臂作正运动学分析,使用解析法来作逆运动学分析。其中涉及到的数学运算有坐标的平移,旋转和齐次变换等,给出了详细的求解过程,为后面的的软件编程提供了依据。
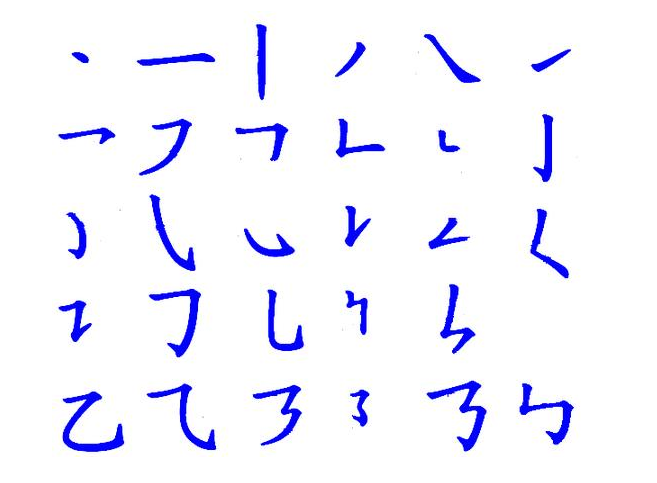
(2)汉字信息获取并转换。在Github上获取了中文GB2312字库后,将其中的汉字笔画坐标数据转换成一个Python字典,供机械臂书写时直接提取字符的笔画坐标信息。
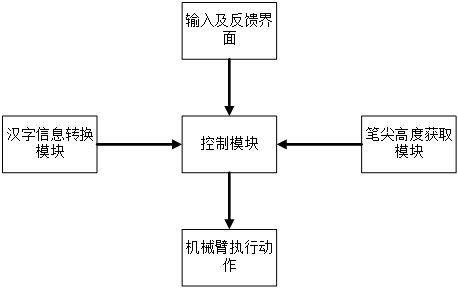
(3)软件编程。通过研究uArm Swift Pro机械臂的Python库,设计笔尖坐标获取模块和书写控制模块,最终实现机械书写功能。同时以Turtle库为基础,设计了一个书写质量的测试验证程序,可以直接验证书写质量。
本文根据机械臂建模理论建立了四自由度的机械臂控制模型,结合Python的库文件,设计了一种机械臂书写程序,成功实现了书写汉字的功能,并对其进行测试验证,测试结果达到要求。在不影响书写功能实现和书写质量的前提下,尽可能优化了代码,并且能实时显示笔尖位置坐标。
关键词:机械臂书写;控制建模;汉字信息;Python
Abstract
As a new robot research project in recent years, machine writing has already produced a lot of achievements in the market. In this paper, on the basis of comprehensive understanding and analysis of the domestic and foreign robot writing research, In order to solve the problem that the information of Chinese characters written by mechanical arm is not convenient to obtain and the software code is relatively long, based on uArm Swift Pro manipulator, the writing program of mechanical arm written by Python is designed. Firstly, by converting the Chinese character library into Python dictionary, the control system can obtain the coordinate information of Chinese characters more conveniently, and then convert the coordinate information into the motor rotation value to drive the machine. Arm movements. The specific contents of the study are as follows:
- modeling of manipulator control. Firstly, the theoretical basis of the modeling of the manipulator is studied and analyzed, and the D-H parameter method is used to analyze the forward kinematics of the manipulator and the analytical method is used to analyze the inverse kinematics of the manipulator. The mathematical operations involved include coordinate translation, rotation and homogeneous transformation. The detailed solution process is given, which provides the basis for the subsequent software programming.
- Chinese character information acquisition and conversion. After obtaining the Chinese character GB2312 font on Github, the Chinese character stroke coordinate data is converted into a Python dictionary, which can be used to extract the stroke coordinate information of the character directly when the robot arm writes.
- Software programming. By studying the Python library of the uArm Swift Pro manipulator, the paper designs a pen point coordinate acquisition module and a writing control module, and finally realizes the mechanical writing function. At the same time, based on Turtle library, a writing quality test verification program is designed, which can directly verify the writing quality.
In this paper, a four-degree-of-freedom control model of the manipulator is established according to the modeling theory of the manipulator. Combined with the library file of Python, a writing program for the manipulator is designed. The function of writing Chinese characters is successfully realized, and the functions of writing Chinese characters are tested and verified. The test results meet the requirements. On the premise of not affecting the realization of writing function and writing quality, the code is optimized as much as possible, and the position coordinates of pen tip can be displayed in real time.
Key Words:Robot writing;Control modeling;Chinese character information;Python
目录
摘 要 I
Abstract II
第1章 绪论 1
1.1 机器人研究背景 1
1.2 机器人国内外研究现状 2
1.2.1 机器人国外研究现状 2
1.2.2 机器人国内研究现状 3
1.2.3 机械臂书写研究状况 3
1.3 研究目的及意义 4
1.4 研究的内容及章节安排 4
第2章 硬件及软件开发平台 6
2.1 软件开发环境 6
2.2 uArm Swift Pro机械臂 6
2.3 需求分析及方案确认 8
第3章 机械臂控制建模 9
3.1 机械臂建模理论基础 9
3.1.1 位置和姿态的描述 9
3.1.2 坐标变换 10
3.2 机械臂运动学分析 13
3.2.1.D-H参数法 13
3.2.2 uArm Swift Pro机械臂正运动学分析 14
3.2.3 uArm Swift Pro机械臂逆运动学分析 17
第4章 机械臂书写的软件设计 22
4.1 软件设计总体方案 22
4.2 汉字信息的处理 22
4.2.1 汉字信息的获取方式 22
4.2.2 汉字信息的转换程序 24
4.3 机械臂书写控制模块 24
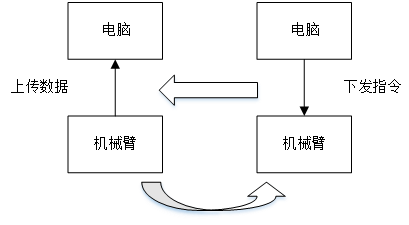
4.3.1机械臂的通信协议 24
4.3.2 机械臂的Python控制指令 26
4.3.3 笔尖坐标获取模块 26
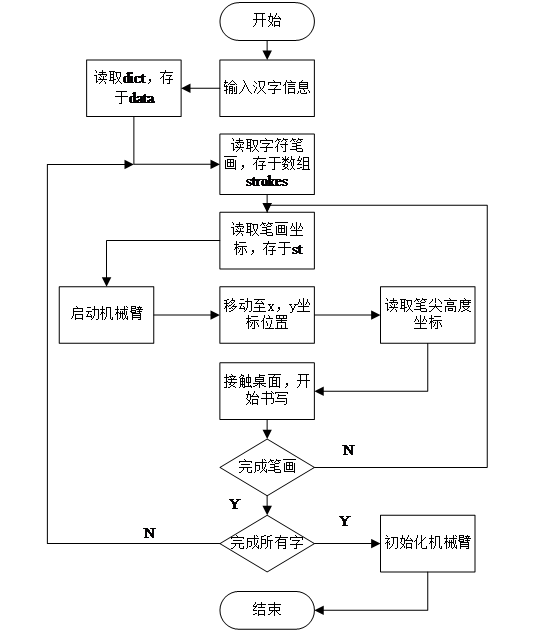
4.3.4 机械臂书写控制模块 27
第5章 书写质量的测试验证 31
5.1 测试验证程序的设计 31
5.1.1 Turtle模块 31
5.1.2 测试验证程序 31
5.2 书写质量的测试验证 32
第6章 总结与展望 34
6.1 全文总结 34
6.2 展望 34
参考文献 36
致谢 37
第1章 绪论
1.1 机器人研究背景
人类很久以前就希望创造出一个像人一样的机器人或者生化人,以此来代替人类完成各种工作任务。随着现代工业技术的迅速发展,才实现了数千年来存在的机器人的概念,直到上个世纪中叶,“机器人”才被引用为专有名词[1]。“机器人”的定义在不同的国家或者组织中也略有不同[2]。例如,美国国家标准局(NBS)的定义是:”一种能够进行编程并在自动控制下执行某些操作和移动作业任务的机械装置”;英国牛津字典中的定义是:“貌似人的自动机,具有智力和顺从于人但不具有人格的机器”;国际标准组织(ISO)的定义是:“机器人是一种自动的,位置可控的,具有编程能力的多功能机械手,这种机械手具有几个轴,能够借助于可编程程序操作来处理各种材料,零件,工具和专用装置,以执行各种任务”。综合上诉,可得到机器人的通用定义是:像人体或人体的上肢一样的人造电子机器设备,可以模仿人体运动并具有智能或感知识别功能。
自第一台蒸汽机问世,在第一次工业革命期间,各种自动机器和动力系统不断被发明并运用于工业生产中,机器人这个构想也开始由想象转变为现实。科幻小说家阿西莫夫在他的小说《我是机器人》这本书中提出了著名的机器人三守则[3]:机器人必须不危害人类,也不许眼看人类收到伤害而袖手旁观;机器人必须绝对服从人类,除非这种服从有害于人类;机器人必须保护自身不受伤害,除非是为了保护人类或者是为人类做出牺牲。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: