动态时序规整外文翻译资料
2022-08-09 10:53:54

英语原文共 16 页,剩余内容已隐藏,支付完成后下载完整资料
动态时序规整
动态时序规整(DTW)是一项著名的,在特定限制下,于两个给定的(时变)序列之间寻找最优排列的技术(图4.1)。直观来看,这些序列以非线性的方式进行规整来彼此相匹配。起初,DTW技术用于在自动语言识别中,比较不同的语言模式,参见[170]。在某些领域,例如数据挖掘和信息检索中,DTW曾被成功应用于自动处理时间形变和与时序数据相关的不同速度。
在这一章,我们将介绍和探讨经典DTW的主要观点(Sect.4.1)并且总结关于局部和全局参数的几个修改(Sect.4.2)。为了提高传统DTW的速度,我们在Sect.4.3描述了一种一般的多尺度的DTW方法。在Sect.4.4我们将展示DTW是如何被用来在一个长数据流中识别所有子序列的,这类似于给定的查询序列(Sect.4.4)。相关排列技术的讨论与参考文献可以在Sect.4.5找到。
图4.1. 两个时间相关序列的时间排列。对齐的点由箭头表示
4.1 经典DTW
DTW的目的是比较两个(时变)序列X := (x1, x2,...,xN )的长度N isin; N和Y := (y1, y2,...,yM) 的长度M isin; N。这些序列可以是离散信号(时间序列),或者更普遍的在等间距点采样的特征序列。下面,我们确定了一个特征空间,记作F。那么xn, ymisin;F对于nisin;[1:n]和misin;[1:m]。为比较两种不同的特征x, y isin; F,需要一个局部成本测度,有时也称为局部距离测度,这定义为一个函数
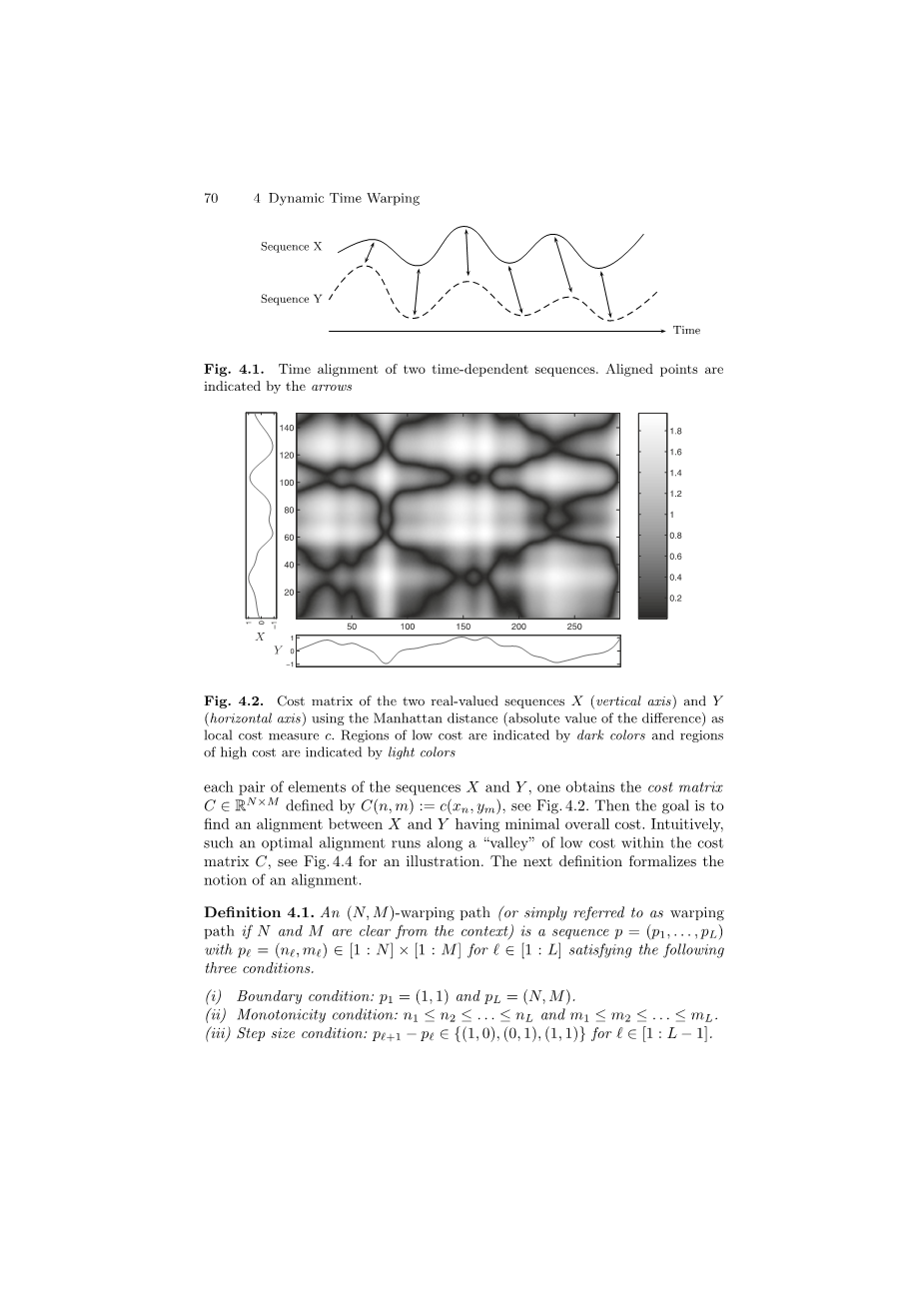
通常,如果x和y彼此相似,那么c(x,y)很小(低成本),否则,c(x,y)很大(高成本)。对序列X和Y中的每一对元素的局部成本测度的估计,得到由C(n, m) := c(xn, ym)定义的
成本矩阵C isin; RNtimes;M,详见Fig. 4.2. 然后,目标是在X和Y中寻找一种有着最小整体成本的排列。直观来看,这样的最优排列方式沿着成本矩阵C的低成本“谷”运行,如图4.4所示。下一个定义形式化了排列的概念。
图4.2. 两个实数序列成本矩阵的X(纵轴)和Y(横轴)使用曼哈顿距离(差值绝对值)作为局部成本度量c。低成本区域用深色表示,高成本区域用浅色表示。
定义4.1. 一个(N,M)-规整路径(若N和M在下文中交代清晰,则可简称为规整路径),是一个对于 lisin; [1 : L]满足以下三个条件的包含pl = (nl, ml) isin; [1 : N] times; [1 : M]的序列p= (p1,...,pL)。
(i)边界条件:p1 = (1, 1) 且 pL = (N,M).
(ii)单调性条件:n1 le; n2 le; ... le; nL 且m1 le; m2 le; ... le; mL.
(iii)步长条件:pl 1 minus; pl isin; {(1, 0),(0, 1),(1, 1)} for lisin; [1 : L minus; 1].
需注意,步长条件暗示了单调性条件,但为了表述清晰,已明确引用。一个(N,M)-规整路径p = (p1,...,pL)通过将X中的元素xnl赋值给Y中的元素yml来定义X = (x1, x2,...,xN )和Y = (y1, y2,...,yM)两序列的排列。边界条件将X和Y的第一个元素和最后一个元素彼此排列。换言之,此排列指的是X和Y的整个序列。单调性条件反映了对于可靠时序的需求:如果X中的一个元素在第二个元素之前,这也适用于Y中相应的元素,反之亦然。最后步长条件表达了一种连续性条件:X和Y所有元素都不可以被遗漏,并且在排列之中没有重复(意义是规整路径p上包含的的所有指数对是两两不同的)。图4.3说明了这三个条件。
在X和Y之间的规整路径p相对于局部成本度量c的总成本cp(X, Y)定义为
此外,在X和Y之间的最优规整路径是一个在所有可能的规整路径中,总成本最小规整路径plowast;。然后定义X和Y之间的DTW距离DTW(X, Y)作为plowast;的总成本:
我们继续讨论关于DTW距离的几个问题。首先需明确,即使可能有几个最低总成本的规整路径,DTW距离也是被明确定义的。其次,我们可以轻易发现,如果局部成本c是对称的,那么DTW距离也是对称的。但是,DTW的距离通常是不正定的,即使对于c也是如此。例如,当c(x1, x1) = c(x2, x2) = 0时,得到序列X:= (x1, x2)和Y:= (x1, x1, x2, x2, x2)的DTW(X, Y) = 0。此外,即使在c是度量的情况下,DTW距离一般也不满足三角形不等式。下面的例子说明了这一事实。
例子4.2. 令F: ={alpha;、beta;、gamma;}为一个三个特性组成的特征空间。对于x, yisin;F,如果x = y,令c(x, y):= 0;如果x ne; y,令c(x, y):= 1,我们以此来定义一个成本测度c: Ftimes;F→{0,1}。需注意,c定义了F上的一个度量,并且特别满足三角形不等式。现在考虑X: =(alpha;,beta;,gamma;),Y: =(alpha;,beta;,beta;,gamma;)和Z: =(alpha;,gamma;,gamma;)。然后很容易检查DTW(X, Y) = 0, DTW(X, Z) = 1, DTW(Y,Z) = 2。因此,DTW(Y,Z) gt; DTW(X, Y ) DTW(X, Z),换言之,DTW距离不满足三角不等式。最后需注意,路径p1 = ((1, 1), (2, 2),(3, 2),(4, 3)), p2 = ((1, 1),(2, 1),(3, 2),(4, 3)),p3 = ((1, 1), (2, 2), (3, 3),(4, 3))为总成本Y与Z之间不同的最优规整路径。这表明,最优规整路径通常不是唯一的。
可以通过测试X和Y之中所有可能规整路径来确定一个最优规整路径。然而,这样的过程会导致计算复杂度以N和M的指数增长。现在我们将介绍一种基于动态规划的O(NM)算法。为此,我们定义对于isin; [1 : N]的前缀序列X(1:n) := (x1,...xn)和对于m isin; [1 : M]的前缀序列Y (1:m) := (y1,...ym),并且令
D(n, m)的值定义了一个ntimes;m矩阵D,也称为累计成本矩阵。显然,D(N,M) = DTW(X, Y)。接下来,一个代表了成本矩阵C或者累积成本矩阵D的一个矩阵项的元组(n,m)将会被称为一个单元格。下一个定理展示了如何有效地计算D。
定理4.3. 累积成本矩阵D满足以下特征:对于n isin; [1 : N],有D(n, 1) =sum;c(xk, y1),对于m isin; [1 : M],有D(1, m) = sum;c(x1, yk),并且对于1lt; n le; N 和 1 lt; m le; M
特别是,DTW(X, Y) = D(N,M)可以用O(NM)运算来计算。
证明. 令m=1,n isin; [1 : N]。那么在Y(1:1)和X(1:n)之间只有一条可能的弯曲路径,且总成本为sum;c(xk, y1)。这证明了D(n, 1)的公式。同理可得D(1, m)的公式。现在,设n gt; 1、m gt; 1,设q = (q1,hellip;,qL-1,qL)为X(1:n)和Y (1:m)的最优规整路径。接着,边界条件意味qL = (n, m)。令(a, b) := qLminus;1,步长条件意味着(a, b) isin; {(n minus; 1, m minus; 1),(n minus; 1, m),(n, m minus; 1)}。并且由此可见,(q1,hellip;,qLminus;1)必为X(1: a)和Y (1: b)的最优规整路径(否则,q对于X(1:n)和Y (1:m)就不是最优的)。由于D(n, m) = c(q1,hellip;,qLminus;1)(X(1: a), Y (1: b)) c(xn, ym),q的最优性意味着声明(4.5)。
定理4.3简化了矩阵D的递归计算。通过额外的行和列来延伸矩阵D并且形式上令对于n isin; [1 : N]有D(n, 0) := infin;,对于m isin; [1 : M]有D(0, m) := infin;,且D(0, 0) := 0来简化初始化。那么(4.5)的递归对于nisin;[1:n]和misin;[1:m]也是成立的。此外,需注意,D可以按列方式计算,其中第m列的计算只需要第(m - 1)列的值。这意味着,如果只对值DTW(X, Y) = D(N,M)感兴趣,那么存储需求就是O(N)。类似地,可以以行方式进行,从而得到O(M)。但是,注意这两种情况下的运行时间都是O(N M)。此外,要计算出最优规整路径plowast;,需要整个(Ntimes;M)矩阵D。下面的练习将演示以下算法OptimalWarpingPath如何完成此任务。
※算法:OptimalWarpingPath
输入:累计成本矩阵D
输出:最优规整路径p
过程:计算最佳路径plowast;= (p1,hellip;,pL)的顺序与以pL = (N,M)开始的索引相反。假设pl=(n,m)已经被计算。在(n, m) =(1,1)的情况下,必有l= 1,这样就做完了。否则:
这里我们取字典上最小的对,以防“argmin”不是唯一的。
图4.4显示了图4.2中各序列的最佳整经路径p(白线)。需注意,plowast;只涉及成本较低的C单元(cf,图4.4a)。得到的累计成本矩阵D如图4.4b所示。
图4.4. (a)成本矩阵C,如图4.2所示;(b)具有最优规整路径p(白线)的累积成本矩阵D
4.2 DTW的变化
为了加快DTW的计算速度以及更好地控制规整路径的可能路径,提出了各种修改方案。在本节中,我们将讨论其中的一些变体,并参考[170]了解更多细节。
4.2.1步长条件
回想一下,定义4.1中的步长条件(iii)代表了一种局部连续性条件,它保证了序列X = (x1, x2,hellip;,xN)中的每个元素被赋值给Y = (y1, y2,hellip;,yM)的一个元素,反之亦然。然而,这种条件的一个缺点是,一个序列的单个元素可能被分配给另一个序列的多个连续元素,从而导致规整路径中的垂直和水平段,见图4.6。直观地说,规整路径可能会卡在某个位置上,相对于一个序列,对应于一个很大程度的局部减速(或者,相反地,相对于第二序列,一个很大程度的局部加速)。为了避免这种退化,可以修改步长条件来约束允许的规整路径的斜率。在第一个例子中,我们用对于lisin; [1 : L]有pl 1-plisin; {(2, 1),(1, 2),(1, 1)}这个条件替换了定义4.1中的步长条件(iii)。见图4.5b。这导致了规整路径在1/2和2范围内具有局部斜率。由此产生的累计成本矩阵D可以通过递归计算出来,对于nisin; [2 : N]和m isin; [2 : N]有:
我们将初值设为:对于n isin; [1 : N]有D(0, 0) := 0, D(1, 1) := c(x1, y1), D(n, 0) := infin;;对于 n isin; [2 : N]有D(n, 1) := infin;;对于m isin; [1 : M]有D(0, m) := infin;;对于m isin; [2 : M]有D(1, m) :=infin;。需注意,对于修改过的步长条件,当且仅当N和M之间的长度最多相差两倍时,两个序列X和Y之间会存在一条规整路径。此外,注意不是所有的元素X都需要赋值给Y的某个元素,反之亦然。如图4.6b所示:在这里,x1分配给y1, x3分配给y2,但是x2没有分配给Y的任何元素(即,x2被省略,且完全不产生任何成本)。
图4.5c给出了步长条件的第二个示例,该示例避免了这种遗漏,同时对规整路径的斜率施加了约束。对于(n, m) isin; [1 : N]X[1 : M]{(1,1)},所得到的累计成本矩阵D的递归式为:
这里初值设定为:对于n isin; [minus;2 : N]有D(1, 1) := c(x1, y1), D(n, minus;2) := D(n, minus;1) := D(n, 0)
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[239447],资料为PDF文档或Word文档,PDF文档可免费转换为Word



