基于超像素分割的图像算法分析研究开题报告
2020-02-18 19:25:46
1. 研究目的与意义(文献综述)
1.1选题背景及意义
1.1选题背景及意义
从组成图像的特征分析出发,结合已有的线性代数和矩阵论的分析方法,学习三种已有的图像超像素分割方法,结合超像素分割算法,分析欠分割与过分割对场景内容理解的影响,利用roc曲线对分割的场景区域进行描述,最后可视化超像素分割的场景图像。
1.2图像分割与超像素
在计算机视觉领域,图像分割(segmentation)指的是将数字图像细分为多个图像子区域(像素的集合)(也被称作超像素)的过程。更精确的,图像分割是对图像中的每个像素加标签的一个过程,这一过程使得具有相同标签的像素具有某种共同视觉特性。
基于像素作为处理单元的图像分割方法,不能分割出目标区域的准确边界,只能给出目标区域的大概的位置。因为,图像是由许许多多的像素组合而成的,如果研究学者只对单一的某个像素点研究并没有什么实际意义,因此研究学者就引出了超像素的概念。超像素在计算机视觉领域已受到了广泛关注,其最重要的原因就是超像素可以有效降低图像处理过程中算法的复杂度。
2. 研究的基本内容与方案
目前超像素算法分类标准有两种:一种是基于算法原理对超像素进行分类,可将算法分为基于图论的超像素分割算法和基于梯度下降的超像素分割算法;另外一种是基于分割出的超像素块是否有规整性对超像素进行分类。判断生成的超像素块的规整性也需花费大量的精力,故就按照第一种超像素分类方法,分别详细的介绍基于图论的超像素方法和基于梯度下降的超像素方法[9]。
2.1基于图论的超像素分割方法
图论方法是将图像元素构成数学上合理的结构或组织,使问题的表述更加灵活,计算更加灵活。通过将一个图划分为若干子图来建模,使得它们中的每一个表示图像中有意义的感兴趣的对象。在所有现有的基于图论分割方法中的方法都涉及使用以下定义:
一个图G=(A,B)是由有限个非空的定点集A和边集B构成,其中A={a1,a2….an}是对应图像元素的一组顶点,其可以表示像素或区域。B是连接一组相邻顶点而组成的一条边。A中的每对(ai,aj)都是一个bij的子集,具有相应的重(ai,aj)量,每条边(ai,aj)都有一个权值公式wij=w(ai,aj),每一个顶点序列从a1到an都有一条代价最小的路径,图论方法就是根据这个路径来处理分割图像的。路径的代价w为:

图论的图像划分领域应用到图像分割中来,形成了基于图论的图像分割方法该方法是将原图二值化形成一个带权值的映射图。首先给定几个基本定义如图2.1所示,图中的点对应着像素点或区域,权值数的大小表示着两个点之间的相关性,通过权值的总和最小而形成的最小代价路线,这条线使得图像分割得以实现。
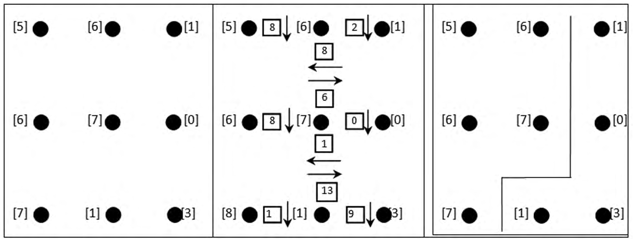
图2.1 图论分割原理
2.1.1Normalized cut算法
如前文中所提到的,将一幅图表示成空间点集的无向加权图G=(V,E),其中V是定点集合,E是两点连接的边集合,w(u,v)是对两个节点连接成的边赋予权值,将图像分割成A和B两个部分的点集,其中V是A和B的集合V=A B,A和B之间的差异程度可表示为移去两区间所有节点连接的边的权值之和所付出的代价,称为割cut [10],表示为:

Shi和Malik为了获得较好的分离效果,提出了提NCut标准割算法,其公式为:

其中 ,为A所有节点与图像当中所有节点V连接的权值之和,当Nout得到了最小值就代表图像的分割是最优化。在求分割最优化的情况下,
,为A所有节点与图像当中所有节点V连接的权值之和,当Nout得到了最小值就代表图像的分割是最优化。在求分割最优化的情况下,

表示标准特征系统,w是元素为wij的对称矩阵,D是一个对角元素为下的对角矩阵,λ![]() 和y分别为公式中所对应的特征值和特征向量。Ncut(A,B)的值表示的是类A和B之间相似度,该值越小则说明分割的效果就越好。
和y分别为公式中所对应的特征值和特征向量。Ncut(A,B)的值表示的是类A和B之间相似度,该值越小则说明分割的效果就越好。
2.2基于梯度下降的超像素分割方法
基于梯度下降的算法思想是:指从最初的初始化聚类后重复用梯度下降的方法不断地更新聚类,直到满足一些收敛条件。最具代表性的算法就是分水岭算法和Slic分割算法。
2.2.1 Watershed算法
分水岭算法[11]是一种传统的分割技术,该算法最初是在 20 世纪 70 年代末,由 C. Digabel和H. Lantuejoul引入到二值黑白图像的分析过程中,再经过Beucher、Vincent等人的深入研究,建立了比较完善的分水岭理论体系,并在20世纪80年代用于灰度图像的分割。1991年,Vincent等人又深入改进了算法,提出了浸没算法,大幅缩短了算法时间。
基于浸水型的分水岭算法是模拟底部浸水过程, 渐渐浸水直到找到目标物边缘。它是将图像灰度值看成地面点高度值, 因此灰度图像就可以看成一幅上下起伏的地形图。每个“积水盆地”之间的“山脉”被称为“分水岭”,浸水型分水岭算法实现原理如下[12]:
(1) 在各“积水盆地”最低点处刺孔;
(2) 将水通过孔洞缓缓注入“积水盆地”;
(3) 随着水慢慢的涌入,水位渐渐上升,当水即将漫过盆地进入其它盆地时,在此即为该盆地的分水岭;
(4) 当水位即将漫过深度最深的盆地时,所有的盆地浸水过程结束,即实现的分水岭操作。
2.2.2 SLIC算法
SLIC算法是simplelinear iterative cluster的简称,该算法用来生成超像素[13]。将图像从RGB颜色空间转换到CIE-Lab颜色空间,对应每个像素的(L,a,b)颜色值和(x,y)坐标组成一个5维向量V[l, a, b,x, y],两个像素的相似性即可由它们的向量距离来度量,距离越大,相似性越小。SLIC具体实现的步骤如下[14]:
1.初始化种子点(聚类中心):按照设定的超像素个数,在图像内均匀的分配种子点。假设图片总共有 N 个像素点,预分割为 K 个相同尺寸的超像素,那么每个超像素的大小为N/ K ,则相邻种子点的距离(步长)近似为S=sqrt(N/K)。
2.在种子点的n*n邻域内重新选择种子点(一般取n=3)。具体方法为:计算该邻域内所有像素点的梯度值,将种子点移到该邻域内梯度最小的地方。这样做的目的是为了避免种子点落在梯度较大的轮廓边界上,以免影响后续聚类效果。
3.在每个种子点周围的邻域内为每个像素点分配类标签(即属于哪个聚类中心)。和标准的k-means在整张图中搜索不同,SLIC的搜索范围限制为2S*2S,可以加速算法收敛,如下图。在此注意一点:期望的超像素尺寸为S*S,但是搜索的范围是2S*2S。
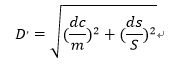
4.距离度量:包括颜色距离和空间距离。对于每个搜索到的像素点,分别计算它和该种子点的距离。距离计算方法如下:
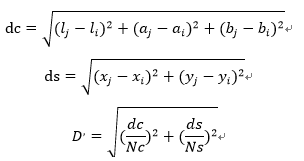
其中,dc代表颜色距离,ds代表空间距离,Ns是类内最大空间距离,定义为Ns=S=sqrt(N/K),适用于每个聚类。最大的颜色距离Nc既随图片不同而不同,也随聚类不同而不同,所以我们取一个固定常数m(取值范围[1,40],一般取10)代替。最终的距离度量D'如下:
由于每个像素点都会被多个种子点搜索到,所以每个像素点都会有一个与周围种子点的距离,取最小值对应的种子点作为该像素点的聚类中心[15]。
5.迭代优化。理论上上述步骤不断迭代直到误差收敛(可以理解为每个像素点聚类中心不再发生变化为止),实践发现10次迭代对绝大部分图片都可以得到较理想效果,所以一般迭代次数取10。
增强连通性。经过上述迭代优化可能出现以下瑕疵:出现多连通情况、超像素尺寸过小,单个超像素被切割成多个不连续超像素等,这些情况可以通过增强连通性解决。主要思路是:新建一张标记表,表内元素均为-1,按照“Z”型走向(从左到右,从上到下顺序)将不连续的超像素、尺寸过小超像素重新分配给邻近的超像素,遍历过的像素点分配给相应的标签,直到所有点遍历完毕为止。
3.1技术实现流程
首先查阅相关资料,充分了解超像素图像分割概念,分析国内外研究现状,以此为依据选出目前最为高效、便捷的三种图像分割方式:阈值分割、区域分割、边缘分割,详细说明实现原理后,自学算法进行代码编写实现图像分割。最后总结在学习过程中的收获,并将此三种方法进行对比,得到各自的优缺点后总结分析。总体流程框图如图3.1所示。
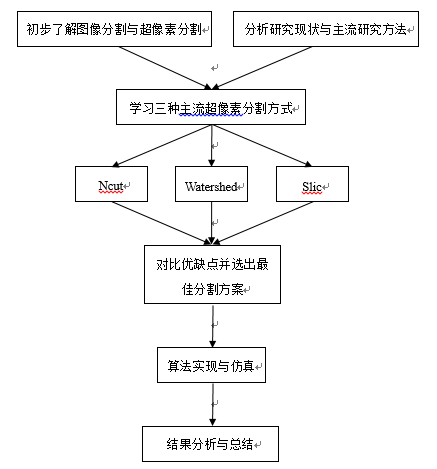
图3.1 方案实现流程图
| |
| |
3. 研究计划与安排
第01周——第03周:搜集相关资料,撰写开题报告;
第04周——第05周:论文开题;
第06周——第12周:撰写论文初稿;
4. 参考文献(12篇以上)
[1] hongyun zhang,ting zhang,witold pedrycz,cairong zhao,duoqian miao.improved adaptive image retrieval with the use of shadowed sets[j]. patternrecognition,2019.
[2] ren x, malik j. learning a classification model for segmentation [c].ieeeinternational conference on computer vision, 2003.
proceedings. ieee, 2003,1: 10-17.



