基于运动想象的脑控机器人系统设计毕业论文
2020-04-12 16:51:18
摘 要
为设计出基于运动想象的脑控机器人系统,本文借助MATLAB实现支持向量机(Support Vector Machine,SVM),实现对基于运动想象的脑电信号的多分类任务。分类之前先通过共空间模式算法(Common Spatial Pattern,CSP)对脑电信号进行特征提取,对于支持向量机的惩罚因子与核心参数利用5倍交叉验证法进行参数寻优,通过多次训练及优化,最终得到了70%的准确率,所得结果对基于运动想象的脑控机器人设计具有一定的实用意义。后期利用Visual Basic设计上位机,最终能够实现与脑电信号处理模块的数据通信,便于观察数据流通与反馈。
关键词:支持向量机;多分类;共空间模式;上位机
Abstract
To design a brain-control robot system based on sports imagination,support vector machine (SVM) is implemented with MATLAB to classify motional imaging EEG signals.The Common Spatial Pattern Algorith(CSP) was used to find the Feature Extraction of EEG Signals,5-fold cross-validation method was commonly used to seek the optimal penalty C and core parameters.Finally, through multiple training and optimization, 70% accuracy can be obtained. The obtained results have certain practical significance for the design of brain-controlled robots based on motor imagery.The upper computer part is designed through Visual Basic which can realize data communication with the brain signal processing module.
Key Words:Support Vector Machine;Muilti-classification;Common Spatial Pattern;Upper Computer
目录
第1章 绪论 1
1.1研究内容 1
1.2脑机接口的基本内容及意义 1
1.2.1 脑机接口基本内容 1
1.2.2 脑机接口系统分类 2
1.2.3 研究目的及意义 3
1.3 脑机接口系统研究现状 5
第2章 脑电信号特征提取及归一化 7
2.1 引言 7
2.2 共空间模式基本原理 7
2.2.1传统共空间模式 7
2.2.2 共空间模式分类 9
2.3归一化与反归一化 11
2.4实现结果 11
第3章 基于支持向量机的分类方法 12
3.1 支持向量机的基本原理 12
3.1.1 引言 12
3.1.2 SVM基本原理 12
3.1.3多分类应用 16
3.1.4 参数设计 18
3.2 结果分析 19
第4章 上位机 21
4.1上位机基本介绍 21
4.2 VB设计过程 21
第5章 结论与展望 22
5.1结论与心得 22
5.2问题与建议 22
参考文献 23
致谢 25
第1章 绪论
1.1研究内容
本文旨在研究基于运动想象的脑控机器人设计,并利用常用的支持向量机算法实现运动想象脑电信号(EEG)的多分类。上位机软件设计用于实现与EEG信号处理模块的数据通信,以研究基本的机器人运动控制算法。在这项研究中,我专注于支持向量机的多分类,研究了多分类的原理及处理方法,如与一对一和一对多的应用。对数据的预先处理也尝试了小波包变换、传统共空间模式等方法,最终目的是尽可能提高对数据的分类准确率以及整个算法的运行速度。
1.2脑机接口的基本内容及意义
1.2.1 脑机接口基本内容
脑机接口的严格定义是一种通信控制系统,它不依赖于大脑外周神经和肌肉正常输出通道[1],实质是通过采集脑电信号并进行分析,进而判断使用对象的想法或者目的,最终实现人脑与计算机或者其他电子设备间的通讯和控制的技术。这样人们就可以直接通过自身的思想直接控制外部设备,摆脱了对语言和肢体的依赖。其具体系统组成如下:
软件控制
机器人运动
信号识别分类
脑电信号采集
信息反馈
图1.1 BCI系统组成
其具体工作过程为:首先,允许受试者进行某种思维活动,然后通过植入电极或者直接外接采集设备以获取该对象的EEG信号。如有必要,对采集到的信号进行滤波和去噪,然后利用模电转换将处理后的EEG数字化。对处理后的数据进行特征提取,再利用支持向量机对其进行多分类,根据需求输入软件,最后实现对机器人的控制。在这个过程中,支持向量机的多分类是本研究的重点,我们的目标是希望能尽可能地提高分类准确率和分类速度。
1.2.2 脑机接口系统分类
脑机接口系统根据不同的分类标准有三种分类方式:
(1)根据脑电信号采集方式分类:植入式BCI与非植入式BCI
植入式BCI是试验前期先将电极植入大脑颅内,电极直接从大脑皮层获得脑电信号[2]。由于是直接从大脑皮层获取,信噪比高,特征更加明显,后期处理就更为简单。但是由于需要进行有创手术,不仅具有一定的危险性,且其适宜植入群体、植入最佳位置以及可植入时间长短等问题都需要再研究,此过程花费的时间、金钱也较多。但是随着相关技术的发展,危险性已经大大下降了。
非植入式BCI则通过外接设备将电极与头皮接触以此获取脑电信号,与前者相比信噪比较低,且更容易受环境与受试者心情影响,对后期处理的准确率要求就更高了。其优点在于无创因而试验风险低,成本也低。
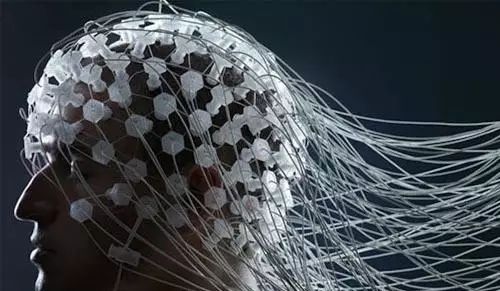 图1.2 非植入式BCI帽
图1.2 非植入式BCI帽
(2)根据输入信号产生方式分类:诱发式BCI与自发式BCI
诱发式BCI的脑电信号是由受试者在外部刺激下产生的,例如光、电、热等。由于它是由外部刺激产生的,所以对象本身不需要经过长期训练来产生信号,且这种方法下所得信号更加规整,分类精度更高。但是在实验过程中,受试者需要一直接受外界刺激,且最终结果有赖于受试者本人的某种感觉通路,个体差异比较明显,应用受到一定的限制。
自发式BCI的脑电信号来自受试者本,即自主产生脑电信号,可控性、灵活性较高,且更加符合BCI系统的原始定义,应用范围更广。然而,由于脑电信号的非平稳性,它很容易受到情绪、外界变化的影响,因此对信号的后续处理要求就比较高,分类准确率也较低。不过这种方法具有更广阔的前景,也是实验室研究和应用发展的重点。
(3)根据系统工作方式分类:同步BCI与异步BCI
同步BCI由系统初始化任务过程,即系统先规定一段时间,受试者必须在这段时间内进行并完成意识活动,产生特殊脑电信号。通过这种方式,BCI系统可以知道需要处理哪一部分脑电信号,这简化了获取并处理脑电信号的工作过程。
异步BCI则由受试者初始化任务过程,即受试者随时可以开始意识活动,系统处于待机状态,等待特殊脑电信号的产生。这样,系统需要始终监测实验对象的脑电信号,并且必须能够准确地确定特殊脑电信号的起点和终点,即受试者意识活动的开始与结束点,大大增加了系统的工作难度与复杂度。但是异步BCI更符合要求,也是今后研究重点与发展方向。
1.2.3 研究目的及意义
随着社会和科学技术的发展,越来越多的具有特定功能的机器人已经出现在我们的视野中。他们会打招呼会行走,但是曾经无一例外需要依靠电气系统或者人类操控。而在近十年,脑控机器人从概念慢慢成为了现实。
在“钢铁侠”中,托尼·斯塔克使用钢铁盔甲进行战斗,他的伙伴从无法完全正确了解他的想法的机器人小呆变成了能与他进行交流协助他战斗、像拥有人脑可以思维对话的贾维斯。曾经以为遥不可及的科幻场面,或许能成为现实,依靠运动想象的脑控机器人,一个能够直接读取人脑信号受大脑控制的机器人,必将为人类的生活带来更多的便利。
 图1.3 利用BCI控制机器手帮助喝水
图1.3 利用BCI控制机器手帮助喝水
对于诸如身患高位截瘫、肌无力、脊髓侧索硬化的这类人来说,虽然他们的身体运动机能受损,但是能够进行正常的思维活动。以霍金为例,他依靠智能系统输出他脑内所想,完成与外界的交流。脑机接口系统能进一步充分利用他们还掌握的能力,让他们能根据自己的想法去完成至少在日常生活范围内的诸多事宜,例如喝水、吃饭。相信不管是对于他们自身还是他们的家人,生活和心理幸福感都有提升。例如脑控轮椅省掉按键直接读取人脑信号,判断使用者希望去的地方;脑控机器人摆脱手柄控制,直接执行使用者的命令,甚至可以帮残疾人打游戏实现娱乐需求;一个稳定和实时的脑机接口系统也可以帮助脑瘫患者逐渐恢复残肢运动并与外界建立联系。
对于健康者来说,可以将脑控机器人直接作为娱乐工具。利用基于思维控制的机器人或其它玩具来进行竞技比赛,可以帮助人们开发大脑,使用日常生活可能不会经常应用到的大脑模块,在娱乐中加强对大脑的使用,学习对大脑的使用和控制,帮助脑部开发。甚至可以拔高到教育层面,通过设计相应的游戏,来引导并教会使用者学习相应的大脑神经学科的知识,理解原理再投入实践,即可得到高分。这个过程可以无形帮助使用者学习控制大脑的技巧,不管是对于大人还是小孩,在提高记忆了、培养逻辑思维能力、提升专注度等方面应该都有不错的成效。抽象的大脑思维成为可见的游戏、可提高的目标,应当是一件有意思的事情。

图1.4 Neurable推出基于BCI的VR游戏



