基于深度学习的驾驶道路环境检测方法研究毕业论文
2020-04-12 16:14:28
摘 要
驾驶道路环境检测系统是自动驾驶汽车、人工智能机器人等的关键模块之一。深度学习技术的出现使行人检测、图片分类等领域出现了突破性的进展,基于深度学习的路况检测系统也使自动驾驶汽车变得更加高效安全,因而实用性大大增加。本次完成了两个子系统的设计:行人检测系统和图片分类系统,分别使用了YOLOv3框架和卷积神经网络技术。YOLOv3框架是一种新的物体检测框架,可以对包括人在内的共80种物体进行检测,用它来进行图片中行人的检测,得到了比较精确的结果。卷积神经网络对图片分类问题有着天然的优势,通过将行人数量不同的图片进行分类训练,建立了一个基于深度学习的道路环境检测的简易模型,并成功对测试图片进行了分类。
关键词:行人检测;图片分类;YOLOv3;卷积神经网络
Abstract
Driving road environment detection system is one of the key modules of self-driving cars and artificial intelligence robots. The emergence of deep learning has led to breakthroughs in pedestrian detection, image classification and other fields. The road condition detection system based on deep learning also makes self-driving cars more efficient and safer, therefore, the utility is greatly increased. This time completed the design of two subsystems: pedestrian detection system and picture classification system. The YOLOv3 framework and convolutional neural network were used separately. The YOLOv3 is a new kind of object detection framework, it can detect 80 kinds of objects including humans. The system got more accurate results by using it to do pedestrian detection in pictures. Convolutional neural networks have natural advantages for picture classification problems. Through the classification training of pictures with different numbers of pedestrians, a simple model of road environment detection based on deep learning was established. And it can classify the test images successfully.
Keywords: Pedestrian detection; Picture classification; YOLOv3; Convolutional neural network
目录
第1章 引言 1
1.1 深度学习技术简介 2
1.2 深度学习原理 2
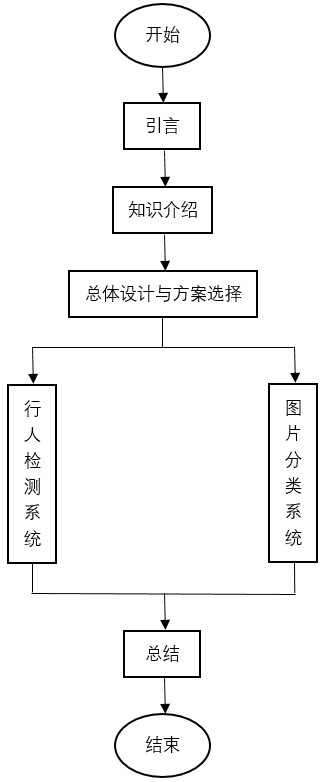
1.3 文章整体安排布局 4
第2章 深度学习相关知识简介 6
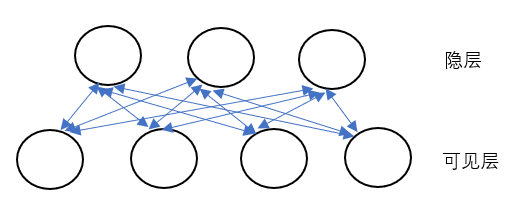
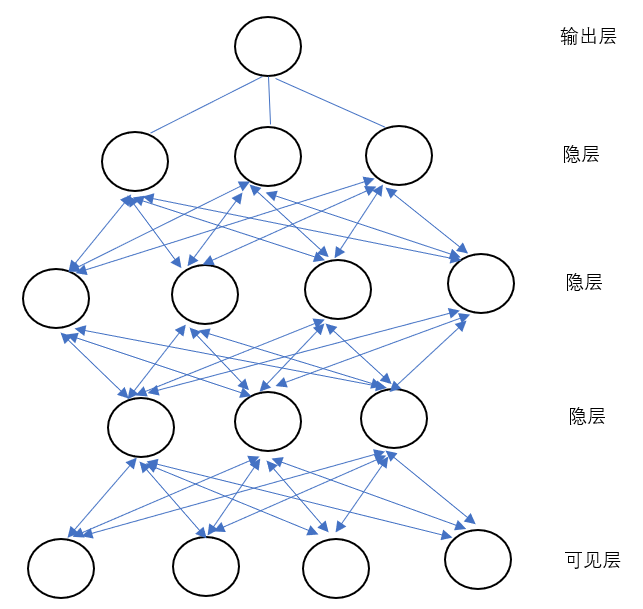
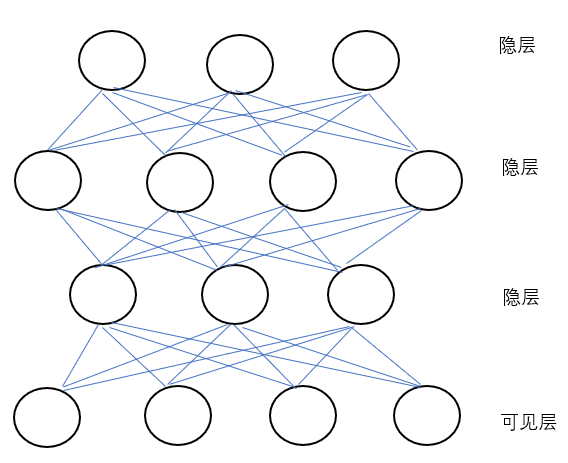
2.1 深度信念网络概述 6
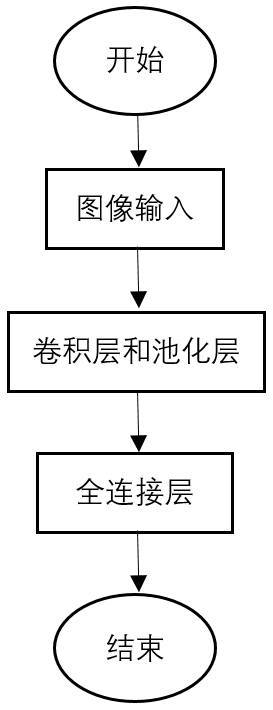
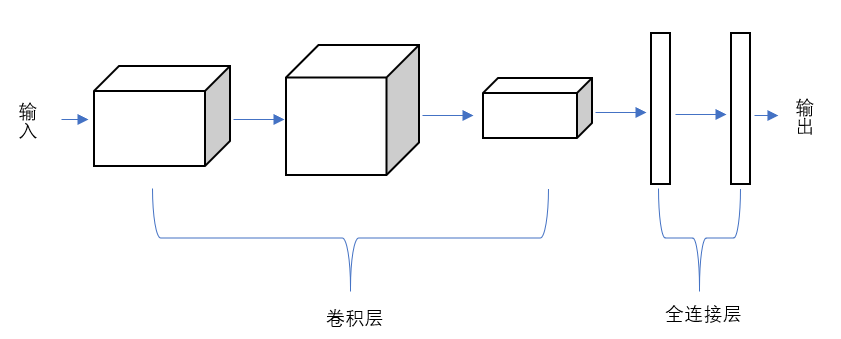
2.2 卷积神经网络简介 7
2.3 深度玻尔兹曼机简介 9
第3章 基于深度学习的驾驶道路环境检测系统设计 10
3.1 引言 10
3.2 行人检测系统设计 10
3.2.1 行人检测技术简介 10
3.2.2 基于深度学习的行人检测方法 11
3.2.3 行人数据库 11
3.3 驾驶道路环境检测模型设计 11
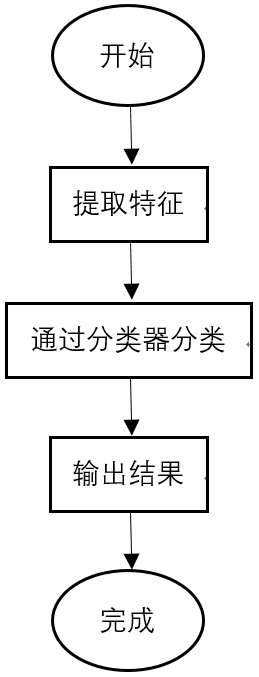
3.3.1 图片分类算法简介 12
3.3.2 基于深度学习的图片分类技术 13
3.4 深度学习网络所用数据集的建立 13
3.4.1 数据集设计思路 14
3.4.2 数据采集条件的局限性及解决方案 14
3.4.3 数据集的建立 15
3.4.4 样本采集方法评价 17
3.5 本章小结 17
第4章 基于YOLOv3框架的行人检测系统设计 18
4.1 引言 18
4.2 YOLOv3目标检测框架简介 19
4.2.1 YOLO框架简介 19
4.2.2 YOLOv3框架简介 20
4.3 前期环境搭建 20
4.4 程序及网络参数的下载和调试 21
4.4.1 程序及网络参数的下载 21
4.4.2 程序调试过程 23
4.5 行人检测结果 27
4.6 本章小结 29
第5章 基于卷积神经网络的图片分类系统设计 30
5.1 引言 30
5.2 用于图片分类的卷积神经网络的设计 31
5.2.1 图片预处理 31
5.2.2 网络结构设计 32
5.2.3 训练参数设定 34
5.3 网络训练与调试 34
5.4 图片分类结果 36
5.5 本章小结 37
第6章 总结与展望 39
6.1 本文工作总结 39
6.1.1 设计成果 39
6.1.2 不足之处 39
6.2 下一步研究方向 39
参考文献 41
致谢 43
第1章 引言
近年来,依赖于计算机性能的大幅提升和大数据行业的蓬勃发展,深度学习技术开始在许多方面发挥越来越重要的作用。它就像第二次工业革命中的电一样,将驱动包括人工智能在内的诸多领域的快速发展,进而带来一场新的技术革命。这场技术革命要完成的是人类对机器改造的终极目标:给机器灌注灵魂。
实际上,现在流行的神经网络所依赖的绝大部分技术手段并不是近年才出现的,它们大多在几年甚至几十年之前已经存在,但由于算法和硬件等多方面条件的限制,神经网络一直没有很好的发展。直到1986年,深度学习理论奠基人、AI教父Geoffrey Hinton提出了适用于多层感知器的反向传播(Backpropagation,BP)算法,并采用Sigmoid作为激活函数,从而解决了非线性分类问题,人工神经网络重新回到了人们的视野。但由于当时计算机性能所限,当神经网络的规模增大时,使用BP算法会出现“梯度消失”问题。这一问题在2006年由Geoffrey Hinton和他的学生鲁斯兰·萨拉赫丁诺夫解决——通过无监督的学习方法对算法逐层训练,然后使用有监督的反向传播算法进行调优[1]。在这篇文章中,首次出现了深度学习这一概念。以此为起点,深度学习技术进入了一个迅速发展时期。
现代生活的方方面面都正在与计算机、互联网等信息技术发生着越来越紧密的联系,近年来兴起的人工智能技术标志着信息技术发展到了一个新的阶段,同时也给相关从业人员提出了新的更高的要求,其中很重要的一方面便是如何使计算机视觉技术更好地服务于人类。计算机视觉是赋予机器“看”的能力,它包含了如图像处理、模式识别、图像理解等诸多领域,它的终极目标是实现机器视觉的拟人化,即计算机能通过它的“眼睛”(图像采集设备)像人一样观察和理解外部环境,并具备实时自适应能力。深度学习的出现大大促进了计算机视觉技术的发展,而卷积神经网络则是神经网络中解决类似问题最适用的网络模型之一。
目前,基于深度学习和计算机视觉技术,比较热门的研究方向有自动驾驶汽车和人工智能机器人等,而无论是自动驾驶汽车对驾驶路况的分析还是智能机器人对周围环境的理解,都需要有道路环境检测系统作为基础。而该系统首先而且不可避免要检测的就是道路环境中最重要也是最复杂多变的因素——行人。
行人检测技术的出现早于深度学习,并且经过诸多研究人员的不懈努力,传统的行人检测方法逐渐趋于成熟,其研究思路和方法囿于固有的框架体系,即使特征选取方法和分类器仍有提升空间,却很难有比较重大的创新出现。深度学习技术出现之后,由于可以使计算机自主学习数据的深层次特征,因此很快被应用于行人检测,并取得了不错的效果。
深度学习是一项面对未来的技术,它将被应用于科学研究的多种领域和日常生活的各个角落。基于深度学习的驾驶道路环境检测系统为智能机器人和自动驾驶汽车提供重要的路况信息,对道路上行人的检测是该系统最主要的任务。
深度学习技术简介
深度学习系统是一种比较特殊,同时也比较先进的人工神经网络。在它的主要提出者Geoffrey Hinton等人经过数十年的研究之后,深度学习算法于2006年闪亮登场。
人工神经网络属于机器学习的范畴,它的主要应用领域是人工智能和其他需要机器自主学习的应用场景。人工神经网络,顾名思义,是一种由人来搭建的,与人的神经系统结构类似的网络模型。最早的可以称为神经网络的人工模型于由两位美国科学家Warren和McCulloch于1943年提出。该模型可以利用单个神经元,有效地执行逻辑功能,被称为MP模型。此后的神经网络一直表现平平,乃至于一度陷入瓶颈。1986年BP算法的提出是神经网络发展史上的转折点,人们纷纷开始重视这项技术。2006年,深度学习横空出世,并在出现不久后就一跃成为机器学习家族中最耀眼的明星。
1.2 深度学习原理
深度学习出现之前的神经网络属于浅层学习。神经网络的构造包括三个部分:用于接收输入数据的输入层,用于进行核心计算的中间层(隐藏层)和用于输出结果的输出层。当神经网络中只含一个中间层时,该网络就是一个浅层网络,否则就是一个深度神经网络。在将所需的神经网络搭建完成之后,如何对网络进行训练使网络参数优化是一个重要的步骤。拿当前发展比较好的有监督学习的方法来说,开始训练后,将提前准备好的训练数据从输入层输入,经过中间层的计算,最后通过输出层输出。输出的值与数据本来的标签进行比较,以某种方法计算出一个差值,这个差值即损失函数。举例来说,在logistic回归中使用了如公式1.1所示的损失函数L。
(1.1)
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: