基于肌肉协同分析的人机交互系统设计与实现开题报告
2020-03-19 12:33:23
1. 研究目的与意义(文献综述)
1.1 研究目的及意义
人类在日常的社会活动中,受各种外界或因素的影响,肢体部分会受到一定程度的损伤,这对人们的行动能力产生了极为消极的影响。亦或是由于人类年龄的增长,各种生理机能会衰退老化,伴随而来的便是肢体行动的不便与困难,如:站立、坐卧、行走等。对于受这些内外因素而造成的种种影响,通过科技手段来进行修复或缓解来进行治疗成为了人们的夙愿。如今,最好的康复手段就是利用运动辅助性器械来帮助他们完成各种各样的大量的、重复的运动,继而引导并增强其自主反应。这为康复训练辅助设备的诞生创造了条件,尤其是仿生假肢,外骨骼机器人及医疗康复机器人是目前国内外相关研究的热点。
康复机器人从最初的被动模式开始发展,而近年的医学实验表明,主动模式的康复训练方式对于人体的运动和知觉恢复作用更为明显,训练效果也更加显著。所谓主动模式,即对康复人员的运动意图进行估计,继而通过该意图实现对机器人或假肢的行为控制。从神经元传输到相关组织或器官的生物电信号载有人类行为信息,能够反应人类的运动意图。通过对生物电信号进行解码,我们就可以识别出人的行为意图,继而可以使机器理解人类的行为意图。表面肌信号蕴含着丰富的信息且目前对于表面肌信号的采集技术十分成熟,因此受到众多研究者的青睐。而在通过表面肌信号识别运动意图的方法中,关节连续运动量估计对实现机器人运动的连续控制较为有价值。
2. 研究的基本内容与方案
本文基于肌肉协同理论,通过nmf算法,将从四通道semg信号中提取的时域特征wl分解为协同元矩阵w和激活系数矩阵h,并通过grnn构建从h映射到腕关节角度的激活模型,从而实现从semg信号到腕关节角度的连续估计,该算法通过matlab平台验证。同时,运用labview设计了估计系统上位机界面,实现了采集数据与估计结果的实时动态显示。最后结合肌电控制策略,控制机械臂和实验者手臂进行实时的同步运动,实现机械臂的在线连续控制。 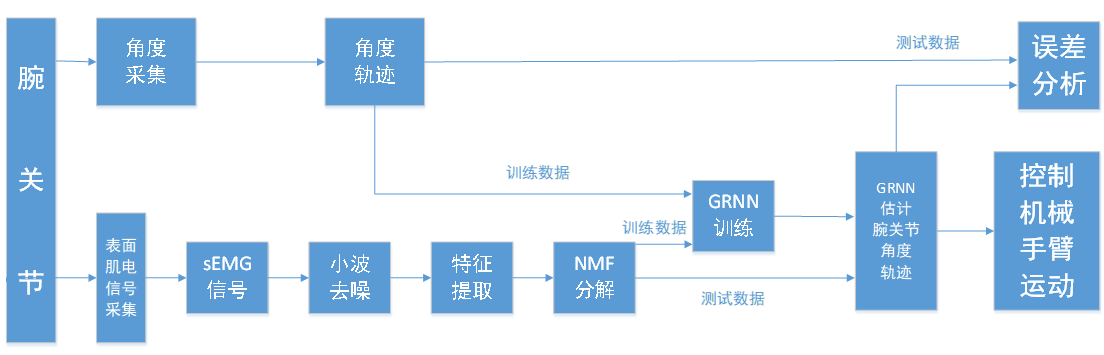
图1系统流程图
在如图所示的系统基本框图中,通过传感器采取semg信号后,要使用小波去噪进行预处理,这是为了保证所得的信号更加准确,以提高后续时域wl特征矢量提取的精确度。随后将所得wl特征经nmf分解得到协同元矩阵及对应的激活系数矩阵,将激活系数数据分为训练数据和测试数据,同样的对应的角度值也要分为训练数据和测试数据。用训练数据基于3折交叉验证与黄金比例分割搜索算法寻找合适的径向基函数平滑参数,从而搭建grnn神经网络模型。最后通过搭建好的grnn对测试组的激活参数进行映射得出估计结果,并将预测结果与实际测试组的角度值进行误差分析。在此基础上,采用肌电比例控制策略将grnn估计出的腕关节运动角度转化为机械臂的目标位移,串口通信传至机械臂控制软件,完成对机械臂的控制,使其完成实时同步的类人运动。通过观察机械臂的运动并与实验者的真实运动进行对比可以更加直观的了解估计角度是否准确。3. 研究计划与安排
第1-3周:查阅相关文献资料,明确研究内容,了解研究所需理论基础。确定方案,完成开题报告。
第4-5周:熟悉掌握基本理论,完成英文资料的翻译,熟悉开发环境。
第6-9周:编程实现各算法,并进行仿真调试。
4. 参考文献(12篇以上)
[1] 桂奇政,孟明,马玉良,等.基于肌肉协同激活模型的上肢关节运动连续估计[j].仪器仪表学报,2016,37(6):1405-1412.
[2] buchanan t s, lloyd d g, manal k, et al. neuro-musculoskeletalmodeling: estimation of muscle forces and joint moments and movements frommeasurements of neural command[j]. journal of applied biomechanics, 2004,20(4):367-395.
[3] cavallaro e e, rosen j, perry j c, et al. real-time myoprocessorsfor a neural controlled powered exoskeleton arm[j]. ieee transactions onbiomedical engineering, 2006,53(11): 2387-2396.



