基于卡尔曼滤波估计器的嵌入式电动摩托车电池充电状态和健康状况管理系统外文翻译资料
2022-11-13 16:08:17
英语原文共 5 页,剩余内容已隐藏,支付完成后下载完整资料
毕业论文(设计)
英文文献翻译
英文题目Embedded State of Charge and State of Health Estimator Based on Kalman Filter for Electric Scooter Battery Management System
基于卡尔曼滤波估计器的嵌入式电动摩托车电池充电状态和健康状况管理系统
Rami Yamin, Ahmed Rachid
技术创新实验室,皮卡迪凡尔纳大学,亚眠市,法国
摘要:本文介绍了一种电池充电状态(SOC)和健康状态(SOH)估算器。它是为电池管理系统(BMS)而设计的,被应用于电动摩托车的48V铅酸电池组。使用PIC微控制器开发一种基于卡尔曼滤波软件的充电状态(SOC)传感器,充电状态(SOC)估算使用相对简单的电池模型,并结合卡尔曼滤波器算法。该估算器能在线(实时)估算电池的充电状态(SOC)和健康状态(SOH)并显示在低功耗LCD屏幕上。
关键词:充电状态(SOC),健康状况(SOH),电池,电池管理系统(BMS),估算,可再生能源,电动摩托车
- 引言
电池是当今最著名使用最广泛的电能存储系统。因此,使用电池储能已经成为日常生活和消费电子设备不可或缺的一部分。此外,它是绝大多数移动电气系统(电动和混合动力车辆,便携式电子设备)和独立建筑物的昂贵关键元件。因此,发展间歇型绿色能源生产、新型混合动力和电动汽车对社会的发展具有十分重要的意义。然而,在消费电子设备中使用电池需要将电池管理系统(BMS)与每个电池组相连接,以此来避免过度充电和过度放电的情况,同时显示电池组中的可用电力,平衡电池单元,在显示电池电力不足时以最佳方式快速充电。
过度放电时,电池会将其电压降低至临界水平,这可能会损坏电池的内部构造并缩短其使用寿命。但是,对电池过度充电不仅会降低电池的使用寿命,而且可能会由于充电时氢的产生过多发生爆炸的危险,也可能在铅酸电池的使用情况下产生火灾,并且可能导致电池盒中的锂电池爆炸,因此对电池过度充电是十分危险的。但是,充电状态(SOC)估计作为现代BMS的核心,它不仅可以准确估算电池组中剩余的能量,还可以作为主机的电池数据采集和管理系统。它能够保护电池装置,平衡电池系统和估计健康状态(SOH)。在之前的论文[1]中,我们在电动摩托车的铅酸蓄电池组上使用扩展卡尔曼滤波器验证了电池的数学模型。法国亚眠市中心已经完成了15公里的赛道,装有BMS的电动摩托车将在此赛道上完成测试。该实验的目的是在现实环境中测试我们的估计器的准确性,以便基于卡尔曼算法为电动摩托车设计精确的嵌入式电池管理系统(BMS)。
2.电池型号
在我们查找的文献中,存在更少或更复杂的变型电池模型。在我们翻阅的参考文献中关于电化学电池模型给出了两个降阶电池数学电池模型的比较,但是这些模型在PIC微控制器中的实现仍然非常复杂。
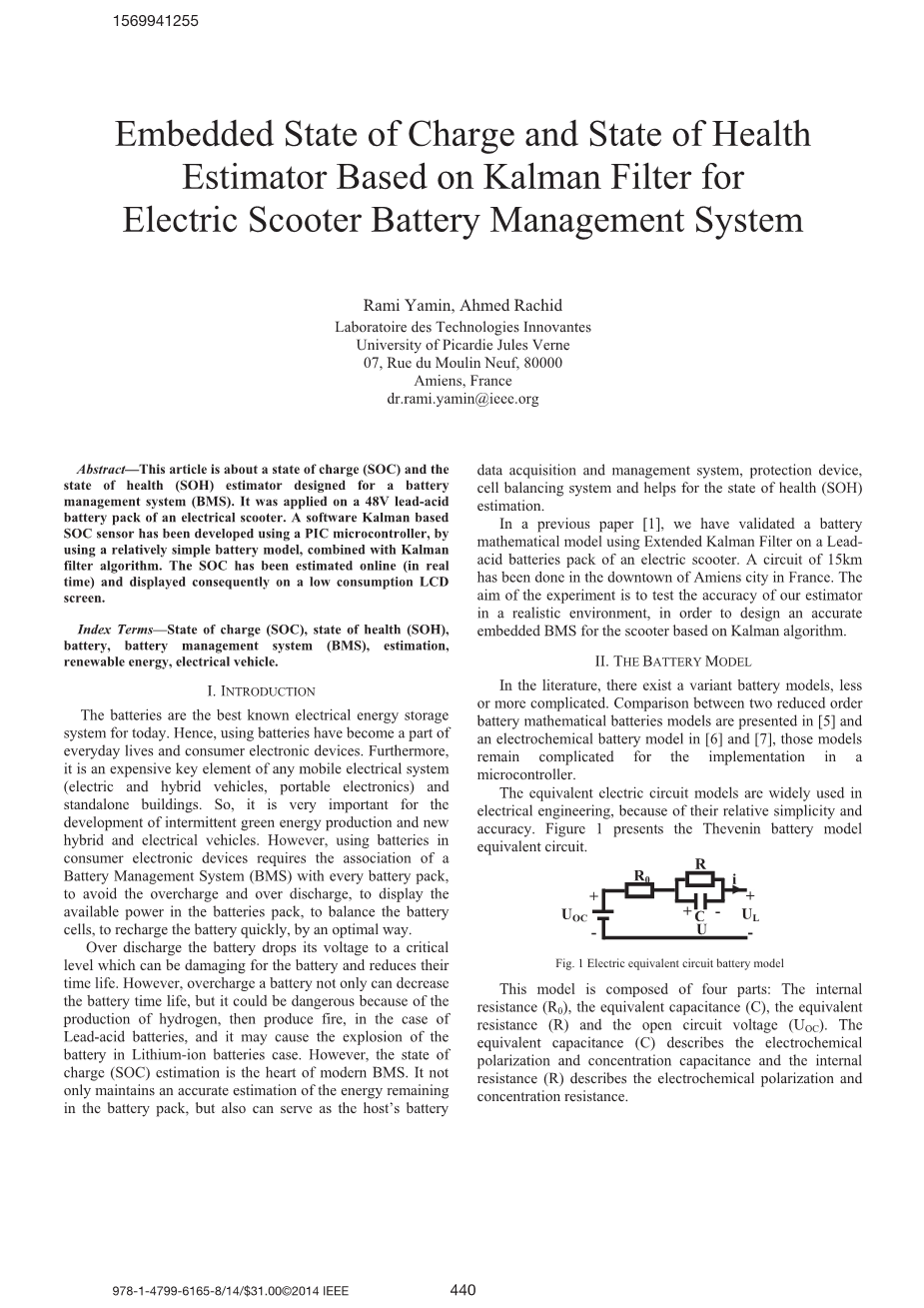
等效电路模型被广泛地应用在电气工程等领域,因为它们相对简单而且准确性较高。图1显示了戴维宁电池模型的等效电路。
图1 电气等效电路电池模型
该模型由四部分组成:内阻(R0),等效电容(C),等效电阻(R)和开路电压(UOC)。等效电容(C)描述了电化学极化和浓度电容,内部电阻(R)描述了电化学极化和浓度电阻。
该模型的数学方程式可写如下:
(1)
(2)
(3)
(i)是充电/放电电流,(U)是电池内部的电压,无法测量。(UL)是电池负载电压。图1以状态空间的形式说明了模型的关系图。
图2 状态空间形式的连续时间模型图
使用抽样方法(欧拉或零阶保持器),离散时间模型可以按照等式(4)和(5)的状态空间形式计算并写出。状态方程或过程方程(4)描述了系统动力学的演变过程;它用于确定系统的动态,稳定性,可控性和对抗干扰的灵敏性。矩阵(Akisin;),(Bkisin;),(Ck )和(Dkisin;)代表系统的动力学,它们在时间上可以是恒定的也可以是可变的。系统在时间(k)上的矢量是(Xk )。系统的确定性输入是(Ukisin;),是我们系统(电池)的电流。该变量()是一个随机过程噪声;它对会影响系统状态的未测量的输入进行建模。该等式(5)表示系统的输出;它被称系统的为输出方程,用于计算系统的输出()。输出方程中的变量()是传感器噪音;它在不影响系统状态的前提下,以一种内存较少的方式对影响系统输出的测量扰动进行建模。
图3 状态空间形式的离散时间模型图
(4)
(5)
电池单元动力学方程在采样周期(例如一秒)内离散化;然后,每个测量值由整数值(k)来索引。
3.卡尔曼滤波算法
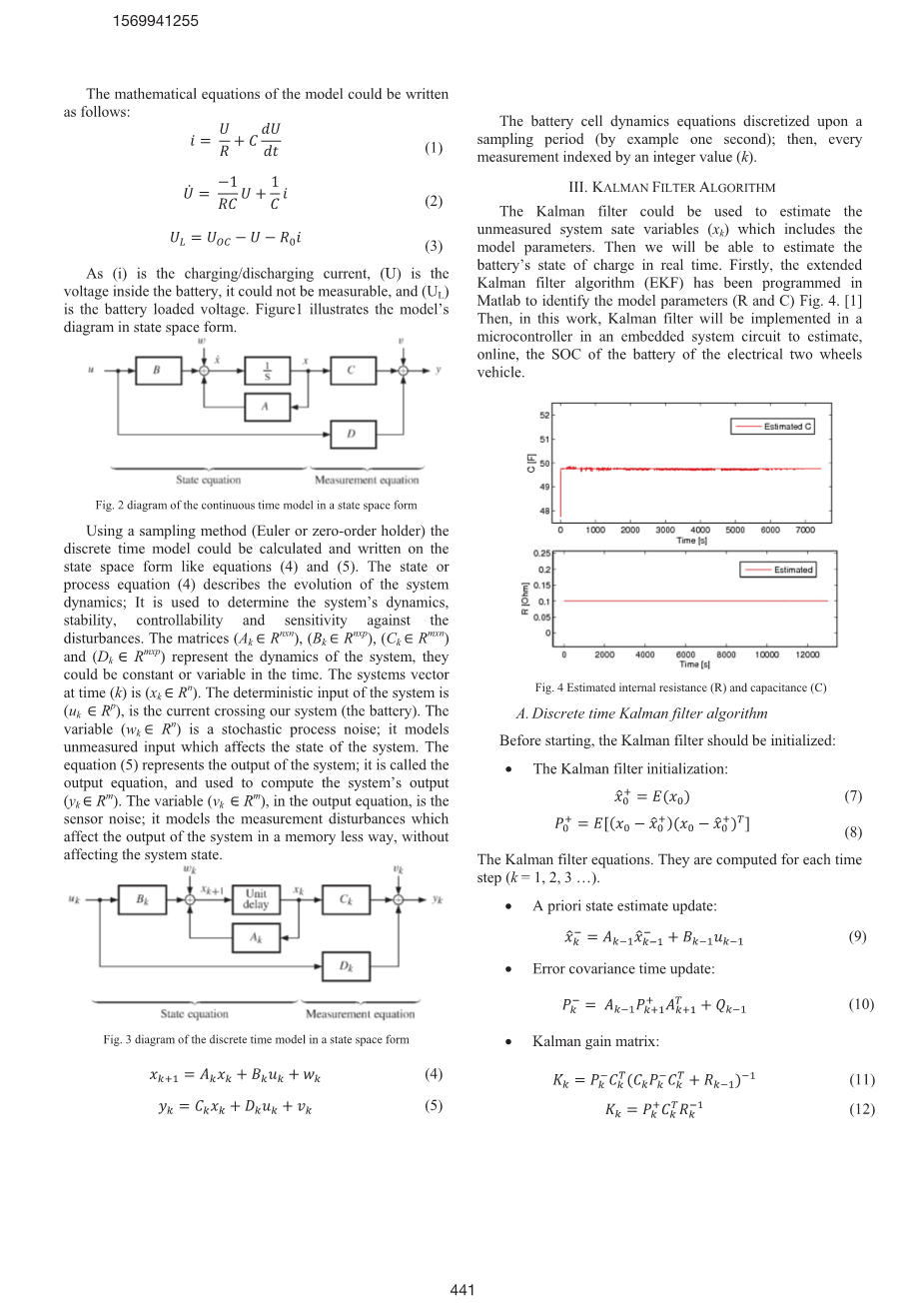
卡尔曼滤波器可用于估计模型参数的未测量系统状态变量(),其中包括模型参数。然后我们就能够通过卡尔曼滤波器实时估算电池的充电状态。首先,在 MATLAB 中对扩展卡尔曼滤波算法(EKF)进行编程,用来识别模型参数(R和C),如图4所示。然后,在这项工作中,卡尔曼滤波器将在嵌入式系统电路的微控制器中实现对电动摩托车电池的充电状态(SOC)的在线实时估算。
图4 估计的内阻(R)和电容(C)
3.1 离散时间卡尔曼滤波算法
在一切步骤开始之前,应该首先初始化卡尔曼滤波器:
^卡尔曼滤波器初始化:
(7)
(8)
卡尔曼滤波方程,它们是针对每个时间步长计算的(k = 1,2,3 ......)。
^先验状态估计更新:
(9)
^错误协方差时间更新:
(10)
^卡尔曼增益矩阵:
(11)
(12)
^后验状态估计更新:
(13)
^误差协方差测量更新:
(14)
噪声(Wk)和(Vk)假设是相互不相关的高斯白垩随机矩阵。[8]
图5 卡尔曼算法状态更新图
3.2 卡尔曼滤波算法的功能
在卡尔曼滤波器算法开始之前,并且在任何计算完成之前,首先应该实现初始化步骤,否则将无法保证后面估算的准确性。因此,第一步应该如等式(7)和(8)所示的设置状态的初始值和误差协方差。即使存在票价初始值,卡尔曼滤波器也会通过对不良初始化值重复进行处理,使它在运行时收敛到真值。
首先,每个采样间隔计算状态和协方差矩阵的两个不同的估计值。第一个先验状态估计值()基于之前在先前迭代中计算的的值来估计,同时它的估计必须在系统输出的任何测量信息之前才能保证系统的准确性。
其次,在测量系统的输出值()之后,估计状态数值会更新(调整优化)第一个估计值。因此,更新的估计状态值和协方差值两者合并包含关于系统输出的知识,因此它们比和这两者的输出更为准确,并且它们将用于显示估计的电池充电状态(SOC)。
卡尔曼滤波器的两个主要步骤:一是预测(时间更新),然后二是校正(测量更新)。在第一步预测步骤中,卡尔曼滤波器会预测当前状态参数的值,系统的输出数值 和协方差误差数值,然后使用系统输出的实际测量数值来校正预测的数值。假设预期过程噪声为零,如等式(9)和(10)所示,通过将系统输入输入到系统模型,在下一个测量点计算预期状态值。
然后,在第二步状态校正步骤中将更新状态值,将实际测量的系统输出值与估计的输出值之间进行比较,如等式(13)所示。输出估计误差(方括号中的项)表示测量的负载电池电压与电池电压估计值之间的差值。测量噪声时的不正确的状态值估计和电池模型的不准确性可能导致这个减法的最终值不为零。这项关于测量的新信息称为创新过程,它将乘以由等式(11)和(12)所计算出的卡尔曼增益矩阵(K)。计算过程如图5所示。
最后,使用等式(14)计算协方差校正的步骤。
通过比较测量信号的水平()和测量噪声的水平(),信噪比(SNR或S / N)可以作为卡尔曼增益的指标()值。如果信噪比(SNR)高,那么卡尔曼增益()增益矩阵也高,如果信噪比(SNR)为低,则增益也会低。信噪比(SNR)会影响卡尔曼滤波器的收敛,信噪比(SNR)越高,卡尔曼滤波器收敛速度就越快。
4.收费状况和健康状况评估
充电状态(SOC)是电池中剩余的能量与完全充电的电池的能量相比的量。在混合动力汽车和电动汽车中,它取代了传统的“燃气表”或“燃油表”的地位。SOC参考范围值在完全放电电池的SOC的0%和完全充电电池的SOC的100%之间。[9]
它可以在数学上表达如下:
(15)
如:
SOC(0):电池的初始SOC
Cn:电池的标称容量,用(Ah)做单位
I(tau;):瞬时电流,(A)(假设放电为正,电荷为负)
N:库仑效率(无单位)可以采取一次放电,小于或接近一次充电。这取决于电池特性(技术);它可以随着温度,充电/放电电流,电池的SOC和SOH的变化而变化。在我们的例子中,假设它是不变的。
状态变量的数量增加了估计的不确定性;因此,为了准确地估计SOC,从等式(2)和(3)中的推导得出的两态模型更适合于SOC的估计和PIC微控制器中的实现。
(16)
(17)
(18)
输出等式(3)中的(UOC)此时已经被它与SOC之间的线性关系代替,如等式(17)所示。因此,还需要识别两个常数参数值()和()。
使用MATLAB中的多项式插值,已经确定了常数()和(),如图6所示。
图6 UOC和SOC之间的关系
因此,遵循图中所示的曲线形状,发现常数(ak)和(bk)的值如表所示:
TABLE I.SOC CONSTANTS
—──────
ak=0.0225
───────
bk=10.75
───────
卡尔曼滤波器稳定且准确,我们可以用它来估算电池的SOC。最后一个可以通过库仑计数法[10],[11]轻松估算,但如果估算误差增加或测量结果有噪声则会失败。
5.实际测试和结果
电动摩托车通过在法国亚眠市中心(超过15公里)进行一次循环来完成放电测试。摩托车配有800 W,48 V的无刷电机。放电电流如图9所示。电压和电流传感器(Xantrex linkpro电池监测器)的作用是通过数据采集(Xantrex)卡记录每秒的电压,电流和温度值,它通过RS232串行总线与主机通信。下图说明了测试体系结构。
图7 测试架构图
嵌入式SOC和SOH传感器基于8位PIC单片机(PIC 18F45K22)。之所以选择它是因为它具有极低的功耗(睡眠模式下为100纳秒,看门狗定时器模式下为500纳秒)和多个外围I / O接口,很符合本系统的设计需求。卡尔曼算法已在微控制器中实现,用来估计SOC和SOH。该系统通过使用拉力分配器和桥形式的电阻来实现电压的测量;它将电池电压(48 V)分开以适应微控制器的模拟输入。然后,接收的值将受到变量的影响并转换为48 V的电压范围值。电流的测量使用一个非常小的分流电阻,测量分流电阻端子上的电压。由于电阻值是已知的,因此很容易使用欧姆定律将分流器上的测量电压转换为电流。这种方法允许我们测量较大的电流量。单线温度传感器的使用是出于安全的目的,用来在电池过热的情况下保护系统。在测试期间,如果电池的温度没有达到危险值,通常是稳定的。
图8 SOC和SOH传感器的概述
下图说明了SOC估算,电流和电压测量。我们可以注意到卡尔曼滤波器使我们能够很好地估计SOC。当电流消耗很严重时电压下降,SOC根据电流和电压量的函数评估时间。
图9 摩托车电流(红)电压(蓝)和
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[18330],资料为PDF文档或Word文档,PDF文档可免费转换为Word



