工业炉温度控制过程中的模糊逻辑智能控制概念外文翻译资料
2022-09-09 16:14:58

英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
工业炉温度控制过程中的模糊逻辑智能控制概念
B Vasu Murthyl, Y V Pavan Kumar2, U V Ratna Kumaril
1.电子计算机工程系,尼赫鲁科技大学(JNTUK),卡基纳达,印度
1.vasu.badireddy@gmail.com, Ivinay Jatna2k6@rediffmail.com
2.航空工程测试服务,霍尼韦尔技术解决方案实验室(私人)有限公司,海得拉巴,印度
2.yvpavan.kumar@honeywell.com
摘要
本文论述了基于模糊逻辑的智能控制器的设计用于工业窑炉系统的温度过程控制中的重要性。所提出的设计的性能相对于常规的PID控制器进行评估。有许多可供设置的可调度控制器处理增益的调整方法。但这些传统方法都不能有效地控制,在非线性过程中,相比温度控制,级联结构的PM控制器是一个比较好的选择。但是,在选择更好的收益时受到限制。也因为控制器的非线性和大惯量的特性,往往也不会产生令人满意的结果。因此,正在进行中的研究是寻找合适的方法来克服这些问题。本文通过以往的PM控制器和基于模糊智能控制器的动态性能进行比较的结果分析。最后,评估所设计的控制器的结构性能和动态性能。整个系统是通过使用MATLAB / Simulink的建模,仿真结果表明,所设计的模糊逻辑控制器具有快速性,鲁棒性好和良好的动态性能。
关键词: 串级控制系统,动态性能分析,模糊逻辑控制器,PID(比例积分微分)控制器,温度过程控制,MATLAB/ Simlink,优化概念。
- 引言
一个PID控制器的最佳灵活性是通过使用两个PID一起控制,它与单一的PID相比较拥有较好的动态性能。这就是所谓的级联PID控制器。在这个控制器中,两个PID被放置为这样一种方式:一个PID的设定值是由另一PID控制的。一个PID控制器作为内环控制器,其采用另一PID的输出为一组点。另一PID作为外环控制器,其控制系统的参数有温度,压力,流量等。因此,级联PID控制器降低了系统的时间常数,并增加了控制器的工作频率。串级控制系统有一些显着的特性,如质量控制,抗干扰能力,灵活性和敏捷性。
PID控制器仅适于已知数学模型的线性系统。但工业炉系统的温度控制是一个非线性的,时滞和时变的系统。因此,当温度常规PID控制器被用来控制工业炉系统时不能产生令人满意的结果。为了摆脱出这个问题,本文引入了模糊逻辑控制器来控制温度。但仍然有稳态误差。为了减少这种误差,本文还引入了基于模糊控制器的模糊控制,以获得最佳性能的系统。在模糊控制器中,PID增益参数由模糊控制器来调节。
- 炉的串级控制系统
工业炉温度控制系统如图1所示。TIC是主控制器,TZC是次级控制器,TI T代表原材料的出口温度测量,而T 2 T表示炉膛测量温度。锅炉温度控制系统的基本操作如下。
图1. 炉温系统的级联控制
辅助控制器(TZC)的设定点为主控制器(TIC)的输出。 TZC控制燃料流动。在加热过程中,从入口到出口材料被放置在坩埚中加热到指定温度。原材料从燃料燃烧室出口,在系统温度下有三种容量组件。它们是锅炉,炉床和加热原料。原材料的负载和干扰是在系统干扰的一方面,而在另一方面的是燃料侧的干扰,如燃料,压力和气流。
在炉内温度控制系统中,主对象是原材料,次级对象是锅炉炉膛内的炉膛。主要控制变量是出口和分控变量中的原材料的温度,炉内的温度。主干扰是在进口处原料的流动和材料的温度。阀前次级干扰是燃料供给压力、炉膛燃料空气混合物的热值等。
级联PID控制系统中必须采取的重要措施之一是,在设计参数的选取上确保主、次回路的时间常数不匹配的问题,从而预防共振保证了安全运行。图2显示了炉级联PID控制系统框图。方程1和2是主要的和次要的对象的传递函数。
图2. 炉级联PID控制系统框图模型
本系统在MATLAB / SIMULINK中实现如图3所示。
这里的Kp,K1,和K D值的选择将导致瞬态响应规格的变更。当比例增益(Kp)增加,则上升时间减小,过冲增加,误差减小,稳定时间的变化小。当积分增益增加时,上升时间减小,过冲增加,稳定时间增加,以及错误显著降低。当微分增益增加时,超调降低,稳定时间减少,以及上升时间略有减少,对误差影响不明显。
级联PID控制器结构的炉温系统
图3. 炉级联PID控制系统模型的MATLAB/Simulink的模型
从上述解释中,PD控制器用于具有快速稳定; PI控制器是用来减少稳态误差。PID控制器用于控制所有的控制动作。因此,应适当地选择控制器的不同组合获得所需的特性。本文采用了PID值增益/循环法。
- PID控制器调节
最终周期/最终增益/循环振荡方法是设置PID控制器的过程增益的简单和更有效的方法。基本上,这些方法有五种类型,在[13,10]中显示。
bull;Ziegler-NicholsPID控制器整定方法
bull;改进的Ziegler-NicholsPID控制器整定方法
bull;Tyreus-Luyben PID控制器整定方法
bull;Pessen的超调PID控制器整定方法
bull;Pessen的积分PID控制器整定方法
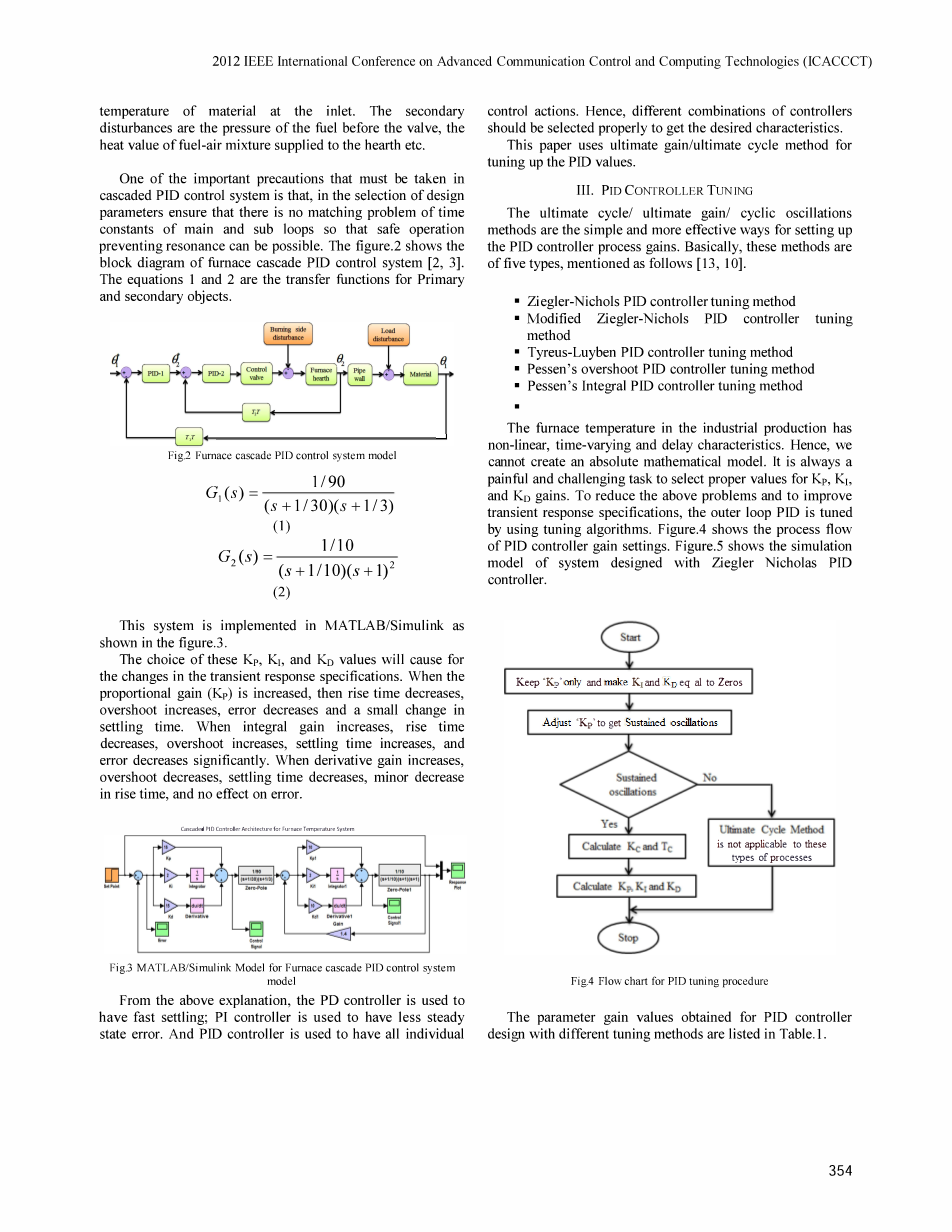
在工业生产中的炉温具有非线性,时变、时滞等特性。因此,我们不能创建一个绝对的数学模型。选择的Kp,K1和KD适当的植始终是一个具有挑战性的任务。为了减少上述问题,以改进瞬态响应规格,外回路PID的调节通过调谐算法调整。图4显示的是PID控制器增益设置的处理流程。 图5显示的是Ziegler Nicholas PID控制系统的仿真模型。
图4. PID参数整定过程流程图
在表1中列出了不同调谐方式的控制器设计参数增益值。
表1.不同PID控制器得到的定义参数
图5. Ziegler-Nichols级联PID控制器系统的MATLAB / SIMULINK模型
- 模糊逻辑控制器系统设计
即使当处理的是一个非线性,时变的系统,模糊逻辑控制[14]也可以使用。工业炉的控制温度是非线性的过程。因此,我们可以应用模糊控制的温度过程控制。模糊控制已成为最成功的一种方法来设计一个复杂的控制系统。它填补了空由纯数学和纯粹的智能方法以及工程工具的差距在系统中的设计留下的空缺。模糊控制系统是基于模糊逻辑的。模糊逻辑系统是一个数学系统,分析了在输入模拟值之间的逻辑值0和1,如图6所示:
图6. 非模糊控制和模控制糊之间的区别
图7显示了系统设计的模糊逻辑控制器的MATLAB模型。它有2个输入端,即信号误差和变化误差。
图7. 模糊逻辑控制器的MATLAB/Simulink模型
- 模糊归属函数
模糊集是由它的归属函数描述的。它归类元素集合中,无论是连续的或离散的。归属函数可以用图形来表示。关于形状的使用有一些限制以及要写的规则来描述模糊规则,归属属函数的形状是一个重要的标准。归属函数是由一个希腊符号'u'表示。
常用的归属函数形状是三角形,高斯和梯形。高斯型归属函数是优选的温度过程控制。但在电炉的温度控制中,最好使用类似于高斯函数的三角归属函数,可以使得计算相对简单。
模糊化的基本方法有Mamdani模糊和一些反模糊化的方法:最大质量法、平均最大值法,第一个最大值法,半线性模糊化法,最后最大值法,重心法,模糊聚类法,自适应融合法。本文采用Mamdani模糊化方法。
B.FLS开发的模糊规则
一般人做决定,就像在计算机语言IFTHEN规则的决定。假设,预计今天天气会很糟糕,明天会很美好。就没有人想今天去推迟工作到明天。关联规则的想法是一个事件关联到另一个事件。表2FLS开发的模糊控制器的模糊规则。
表2利用模糊规则进行模糊推理结构发展(FIS)的模糊逻辑控制
- 模糊PID控制器系统设计
常规的PID控制器[14,16]参数增益总是通过一些测试方法获得的。这些方法精度低,调试时间长。近年来,基于模糊逻辑的方法,提出了一种基于智能算法的PID控制器设计方法。该方法采用常规PID控制和模糊逻辑控制的优点。图8显示了模糊PID控制系统的设计。
图8. 模糊PID图的MATLAB / SIMULINK模型
图9显示的模糊PID控制器的系统设计的输入和输出选择。这个误差和误差变化的误差作为输入,PID控制器参数的增益(比例 积分 微分)作为模糊逻辑控制的输出。这些PID参数的增益赋给常规PID控制块。表3显示的是FLS开发的模糊PID控制器的模糊规则。
图9. 模糊PID控制器的系统设计中选择输入/输出
表3. 模糊推理结构的规则(FIS)的模糊PID控制器的模糊规则
- 仿真结果
本系统的设计采用了传统的PID控制器,在Ziegler-Nichols调整系统中改进了Ziegler-Nichols,Tyreus-Luyben,Pessen的和Pessen的积分PID自整定算法的过冲。图10显示的系统设计与上述不同,PID参数整定方法与所有方法的响应比较,Tyreus Luyben提供了很好的响应。
图11显示模糊逻辑控制器的系统设计的响应。在这里,系统响应抑制振荡,产生平滑的响应,但它给人一种不稳定的状态误差。图12显示模糊PID控制器的系统设计的响应。其中PID控制增益利用模糊逻辑控制器调整,使系统的响应平稳,误差也降低到0%,同时保持模糊控制器的优点。比较不同调谐处理方法,瞬态响应/动态性能特征的计算如表4所示。
图10. 不同控制器的所有响应的比较
图11. 模糊逻辑控制器的系统响应
图12. 模糊PID控制器的系统响应
表4. 各种控制方法的时域性能参数的比较
- 结论
因此,本文首先将传统的PID控制器作为电加热炉系统的温度过程控制器。后来基于模糊逻辑的智能控制器的引用。并对两者的性能进行比较和评价,从表4下面的参数[ 9 ]可以看到。
- 在Tyreus Luyben PID控制器的情况下,延迟时间、上升时间和稳定时间比改进Ziegler-Nichols更好,近似于Ziegler-Nichols方法。此外,它主要的优势在于平稳的瞬态过程和减少超调量。
- 为了抑制这些严重的振荡,建议使用模糊逻辑控制器。从结果中可以观察到,该控制器可以有效地抑制振荡,并产生平滑的响应。但它给了一个稳定的状态误差,值为5.8%。
- 此外,为了抑制稳态误差,建议使用模糊PID控制器,其中的PID控制增益采用模糊逻辑的概念调整,结果表明,这种设计可以有效地抑制误差为0%,同时保留模糊控制器的优点。
因此,可以得出结论,传统的PID控制器不能用于非线性过程的温度控制。因此,所提出的模糊逻辑控制器的设计是一个更好的选择去实现非线性过程的温度控制。
温度控制系统模糊PID控制算法的研究
蒋静 张雪松
力学与电力工程系 电子光学系统国家重点实验室
华北科技学院 技术
中国矿业大学 中国河北
中国北京 电子邮件:xuesong.zhang@ia.ac.cn
电子邮件: jiangjing@cumtb.edu.cn
摘要:在本文中的优势是分析了传统的控制器和模糊逻辑控制器的优缺点,分析了电加热炉的控制特性。根据智能控制理论、模糊PID复合控制(PID)被选为双输入双输出系统实现对电加热炉智能控制。根据实际温度控制系统,采用PID控制和模糊控制的智能控制系统的设计。它具有一定的适应能力,较强的鲁棒性和稳定性,可应用于难以建立精确的数学模型的系统中。
关键词:温度控制;模糊控制; PID控制模型。
1.简介
温度是工业对象的主要参数之一。温度控制对象的热惯性大,到达设定温度后严重抖动,易受干扰[ 1 ]。温度控制对象具有非线性、强耦合、时变时滞等特性。如何提高温度控制系统的精度一直是工业温度控制领域的一个重要课题。电加热炉温度控制系统是一种典型的控制过程,具有大惯性、大滞后伴随着非线性特性。电加热炉的温度控制系统有其特殊性,温度升高时,温度上升取决于电阻丝的发热,但温度下降取决于系统散热的渗透性和材料的散热性。如果锅炉温度超过设定值时,锅炉不能直接冷却,我们不能调节温度的灵活性。因此,研究电炉最佳温度控制方法对提高控制系统的经济性和稳定性具有重要意义。
2.模糊PID控制算法
控制变量的计算系统的
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[146114],资料为PDF文档或Word文档,PDF文档可免费转换为Word



