多传感器信息融合技术研究开题报告
2020-02-18 19:23:10
1. 研究目的与意义(文献综述)
多传感器信息融合技术是近年来十分热门的研究课题,它结合了控制理论、信号处理、人工智能、概率和统计的发展 ,为机器人在各种复杂的、动态的、不确定或未知的环境中工作提供了一种技术解决途径。多传感器信息融合是指综合来自多个传感器的感知数据 ,以产生更可靠、更准确或更精确的信息。经过融合的多传感器系统能完善地、精确地反映检测对象特性 ,消除信息的不确定性 ,提高传感器的可靠性。经过融合的多传感器信息具有以下特性 : 信息的冗余性、信息的互补性、信息的实时性和信息的低成本性。
传感器是贯穿各个技术和应用领域的关键技术,在人们可以想象的所有领域中,它几乎无所不在。多传感器的集成与融合技术迅速扩展到军事和非军事的各个应用领域,如自动目标识别、自主车辆导航、遥感、生产过程监控、机器人、医疗应用等。
多传感器信息融合技术是智能移动机器人的关键技术之一。移动机器人在未知环境下的多传感器信息融合,主要解决其自主定位与导航问题。随着传感器技术的发展以及信息融合技术水平的提高,移动机器人获取环境信息的感知能力以及系统决策能力将会得到不断的提高。传感技术、智能技术以及计算技术的不断发展,将会促进移动机器人向智能化、完全自主化方向发展,移动机器人一定能够在有害和危险环境、极限作业及太空等各个领域中扮演拟人的角色。
2. 研究的基本内容与方案
2.1 研究内容
本论文着重研究多传感器信息融合的层次结构、体系结构和融合方法。并对其中的关键算法进行仿真和分析。
2.2 研究目标
了解数据融合的相关基础知识、掌握多传感器数据融合的基本原理及主要技术、研究多传感器数据融合关键技术,并对其具体实现算法进行仿真分析、根据仿真结果,结合实际,对其应用进行分析。
2.3拟采用的技术方案及措施
多传感器集成与融合并不是简单的相加,是由5个方面的研究内容组成,即融合结构、控制结构、传感器选择策略、世界模型和融合方法。 先通过查看资料及相关文献了解信息融合的基本概念以及多传感器信息融合的过程,其中包括多传感器数据融合的一般过程、多传感器数据融合的类别、数据融合的处理体系结构、融合方法等,然后了解多传感器信息融合的各种算法(如PID融合算法、神经网络法、模糊理论法、D-S论据理论、卡尔曼滤波法等),根据实例分析各算法组合结果的优缺点,对最优信息融合算法提出改进,建立信息融合识别模型,随后进行matlab仿真观察设计结果,如出现错误重新学习并改正。
 |
将传感器信息融合系统的 4 个主要元素概括为:一是信息源元素(含传感器元素) ,它向系统提供原始的信息;二是信息转换、传递、交换元素 ,它完成信息的预处理;三是信息互补、综合处理元素 ,它完成信息的再生、升华 ;四是信息融合处理报告元素 ,即输出融合处理结果.
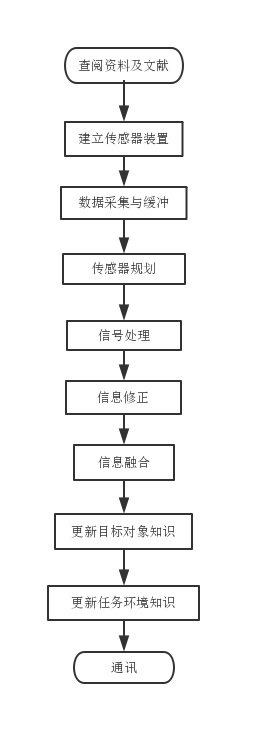
通过简单的8部即可简单的完成一种信息的融合,先通过建立传感器装置,然后进行数据的采集,选择出最合适的算法,对信号进行处理,随后对传递的信息进行信息修正与信息融合,最后更新目标对象知识和任务环境知识,便可进行通讯。
3. 研究计划与安排
1-3周:查阅相关文献资料,熟悉题目含义及基本研究内容,撰写开题报告。
4-9周:完成相关理论知识的学习与研究,对数据融合的关键技术进行学
习。
4. 参考文献(12篇以上)
[1]罗俊海,王章静.多源数据融合和传感器管理. 清华大学出版社. 2015.
[2]赵宗贵. 分布式信息融合--理论与方法. 电子工业出版社. 2018.
[3]jitendra r. raol. data fusion mathematics. crc press. 2015.



