轮毂电机驱动电动汽车动力系统设计与性能仿真毕业论文
2020-02-18 10:44:56
摘 要
在过去的一百多年,汽车工业得到了迅速的发展,汽车成为人们生活中必不可少的交通工具,在很大程度上改变了人类的生活方式。随着汽车工业的不断发展,汽车燃料燃烧带来了的能源消耗问题和环境污染问题,传统燃油汽车所带来的能源和环境的问题推动了新能源汽车产业的发展。轮毂电机驱动的电动汽车因为其整车质量低、结构较简单、传动效率高、响应速度快的优点受到关注,将会成为新能源汽车的一个重要发展方向。本文针对轮毂电机驱动的电动汽车动力系统进行研究。
本文介绍了轮毂电机和轮毂电机驱动的电动汽车的结构特点,对比分析了轮毂电机驱动电动汽车相对于传统汽车和混合动力汽车的优点。针对轮毂电机驱动的电动汽车发展和国内外研究现状进行了综述。
针对轮毂电机电动汽车的动力系统进行研究。根据给定的汽车基本参数和动力性需求对该电动汽车进行动力匹配。通过AVL-Cruise平台搭建该车动力系统模型,并从汽车最高速度行驶速度、百公里加速、最大爬坡度三个方面对该车动力性进行仿真验证。仿真结果表明:该车最高车速140.9 km/h,百公里加速时间9.25 s,车速30 km/h时最大爬坡度32.95%,NEDC工况下续航里程325.8 km,EUDC工况下续航里程372.7 km,动力性满足设计要求。
关键词:轮毂电机、电动汽车、动力系统、仿真
Abstract
The rapid development of automobiles has largely changed the way of people live and become an indispensable means of transportation in people's lives. With the continuous development of automobiles, the energy consumption problems and environmental pollution problems caused by the fuel combustion of automobile are increasing. The energy and environmental problems brought by traditional fuel vehicles have promoted the development of the new energy automobile industry. The electric vehicle driven by the in-wheel motor has attracted much attention because of its simple structure, low quality of construction, high transmission efficiency and fast speed. It will become an important development direction of new energy vehicles. This paper studies the electric vehicle power system driven by the in-wheel motor.
The electric vehicle driven by the in-wheel motor is an important development direction of the new energy vehicles. This paper introduces the structural characteristics of the in-wheel motor and electric vehicle driven by the in-wheel motor, compares and analyzes the advantages of the electric vehicle driven by the in-wheel motor relative to the traditional automobile and the hybrid vehicle. The development of electric vheicle driven by in-wheel motors and the research status at home and abroad are reviewed.
Research on the power system of the in-wheel motor electric vehicle. The electric vehicle is dynamically matched according to a given basic vehicle parameter and power demand. Based on the AVL-Cruise platform, the vehicle powertrain model was built, and the vehicle dynamics were simulated and verified from the three aspects of maximum speed, 100km acceleration and maximum grade. The simulation results show that the maximum speed of the car is 140 km/h, the acceleration time of 100 km is 9.25 s, and the maximum grade is 32.95% when the speed is 30 km/h, the cruising range is 109 km/h under the NEDC conditions, and the cruising range is 228 km/h under the EUDC condition. The power meets the design requirements.
Keywords: in-wheel motor, electric vehicle, power system, simulation
目录
摘要 I
Abstract II
第1章 绪论 1
1.1研究的背景 1
1.2 轮毂电机及驱动的电动汽车结构特点 1
1.3 轮毂电机驱动电动汽车国内外研究现状 3
1.3.1 轮毂电机驱动电动汽车国外研究现状 3
1.3.2 轮毂电机驱动电动汽车国内研究现状 3
1.4 轮毂电机驱动电动汽车未来发展趋势 4
1.5 本文研究的主要内容 4
第2章 电动汽车动力学模型分析与计算 5
2.1 汽车驱动力与行驶阻力 5
2.2 电机参数设计 6
2.2.1 电机功率设计 6
2.2.2 电机转速设计 7
2.3 电池组参数设计 8
2.4 本章小结 8
第3章 整车建模仿真 10
3.1软件介绍 10
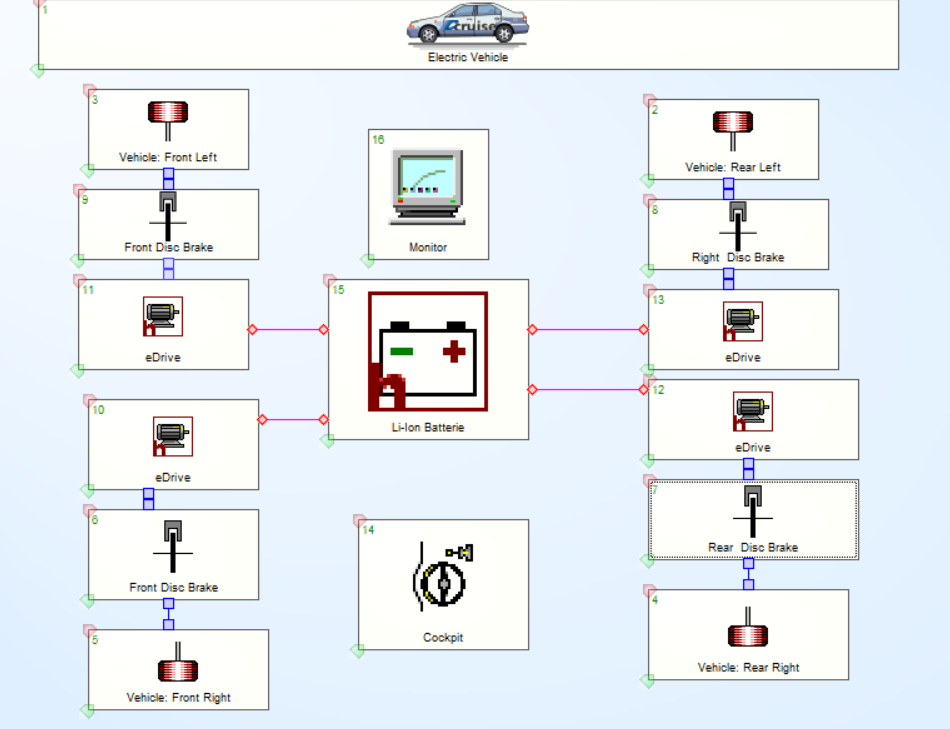
3.2 动力系统模型的建立 10
3.2.1 生成项目及车辆模型 10
3.2.2 能量连接 11
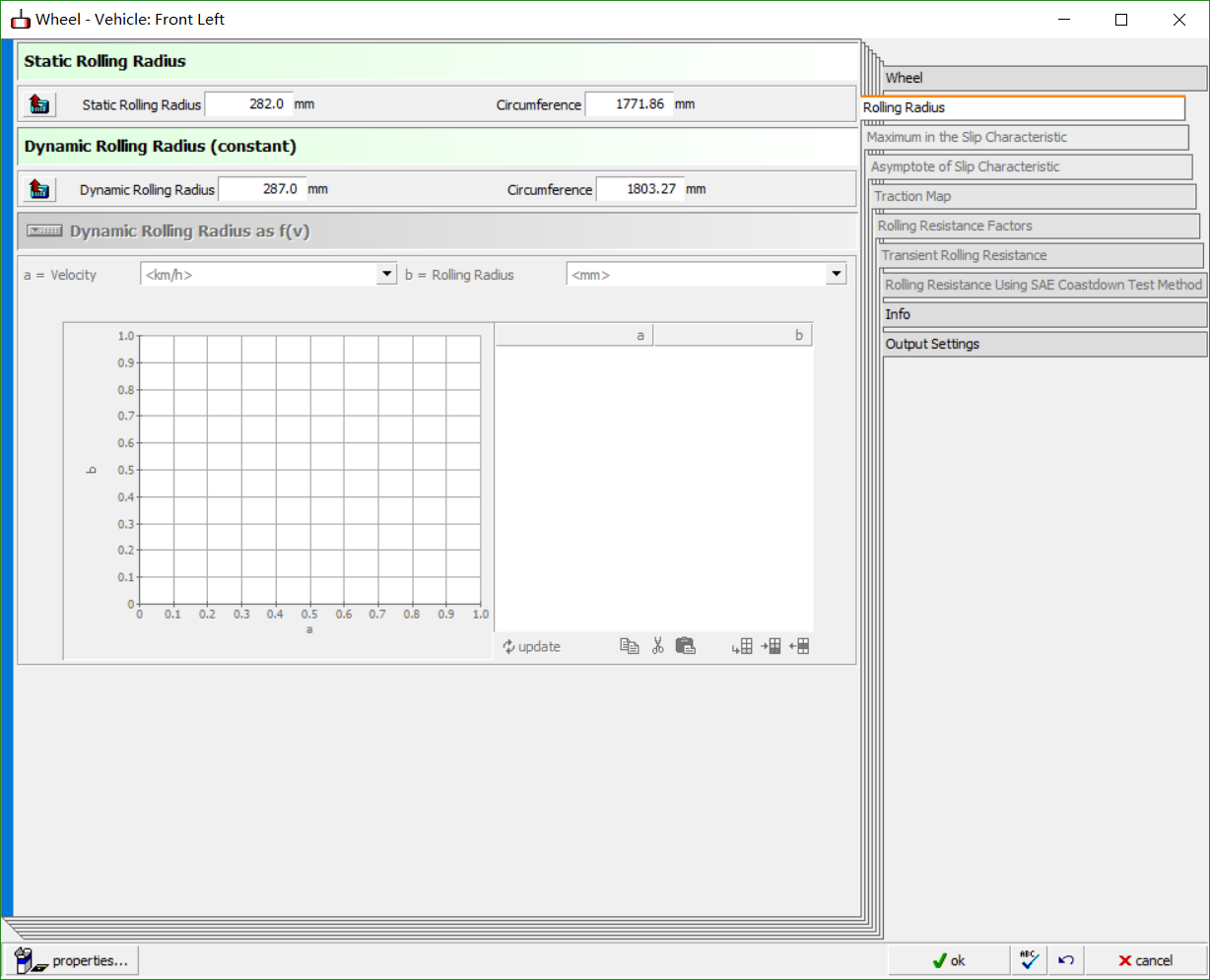
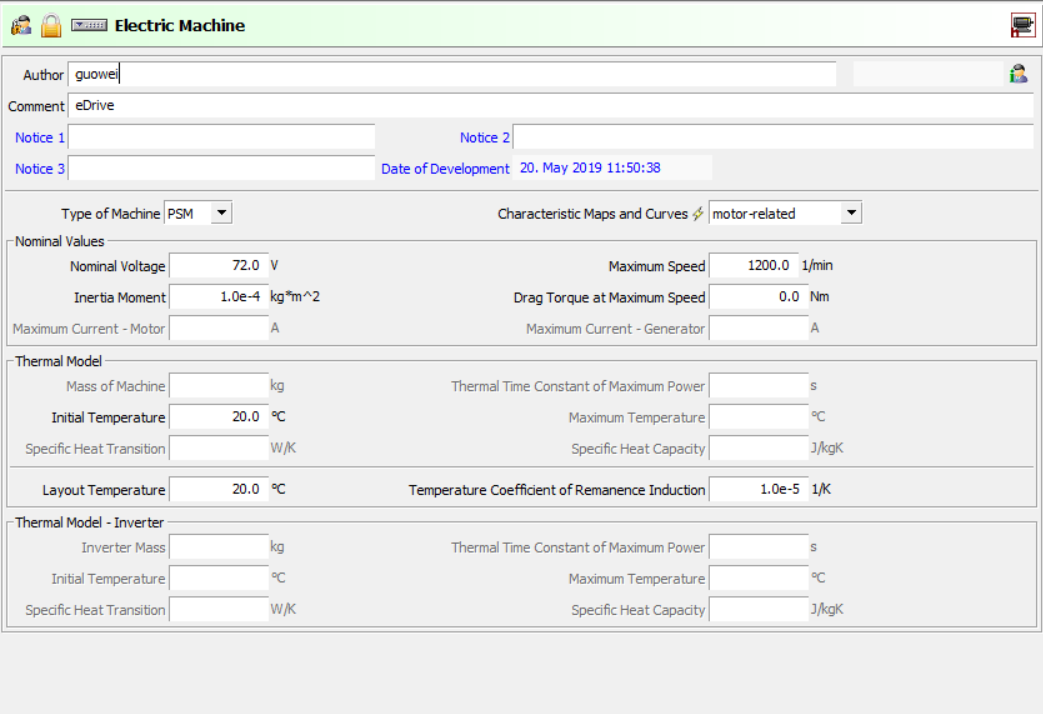
3.2.3 各模块数据的输入 12
3.3 信号连接 16
3.4 计算任务的建立 17
3.4.1 最高车速计算任务的建立 17
3.4.2 最大爬坡度计算任务的建立 18
3.4.3 加速性能计算任务的建立 18
3.4.4 续航里程计算任务的建立 19
3.5 本章小结 20
第4章 仿真结果分析 21
4.1最高车速计算结果 21
4.2 爬坡度计算结果 21
4.3 加速性能计算结果 22
4.4 续航里程计算结果 22
4.5 本章小结 23
第5章 总结与展望 24
5.1 全文总结 24
5.2展望 24
参考文献 25
致谢 26
附录: 27
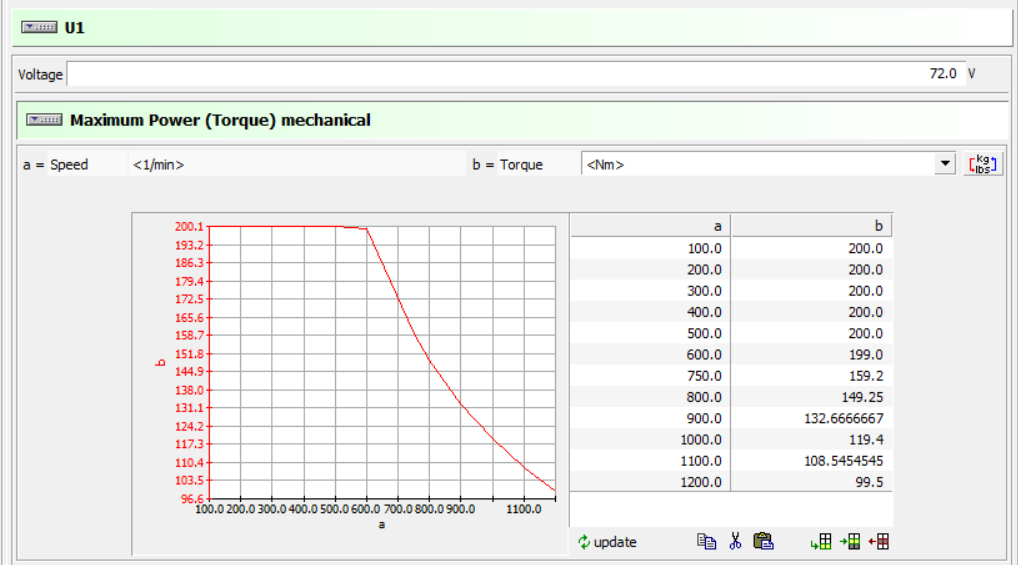
附录1 驱动电机转矩与转速关系 : 27
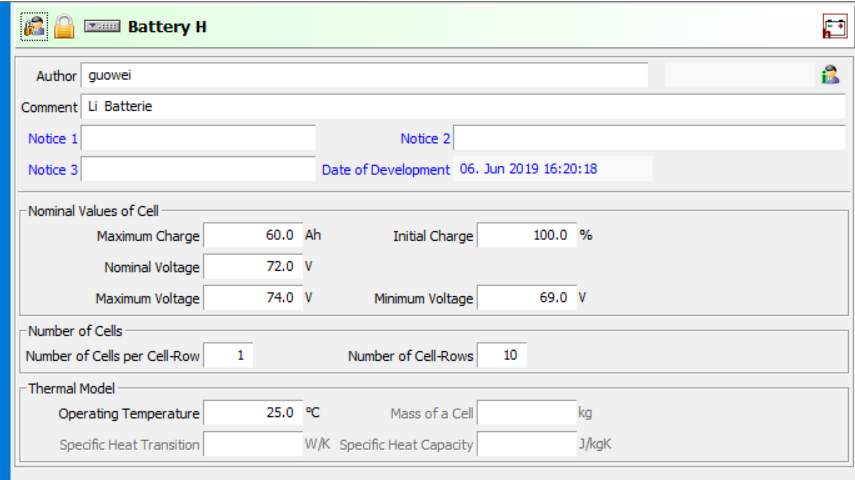
附录2 驱动电池充放电电压随SOC变化: 27
附录3 最高车速测试工况数据: 28
附录4 车速测试工况车速随时间变化曲线: 28
附录5最大爬坡度随车速变化曲线: 29
附录6 百公里加速时间: 30
第1章 绪论
1.1研究的背景
汽车作为交通工具自1885年问世后得到了非常迅猛的发展。据统计,截止2018年,我国汽车保有量已经达到了3.3亿辆。[1]但是汽车在为人来带来便利的同时,汽车工业的发展也为社会带来了负担。汽车排出的尾气中含有CO、CO2、CH、NOx等多种有害气体,会导致酸雨、雾霾、温室效应等一系列不良反应,对我们赖以生存的环境造成巨大的影响。并且随着我国汽车保有量的不断增加,也对日益枯竭的石油资源带来了巨大的压力。伴随着环境和资源的双重压力,新能源汽车走上了历史的舞台。
新能源汽车根据其动力来源可分为混合动力汽车(HEV)、纯电动汽车(BEV)、燃料电池汽车(FCEV)。在上述几种新能源汽车中,纯电动汽车因为其成本低,零排放的、能源来源广泛等优点,必将在未来汽车工业发展过程中占据一席之地。
伴随着轮毂电机技术的发展,轮毂电机纯电动汽车也渐渐进入大家的视野。根据电机个数,可以将纯电动汽车分为单电机驱动和多电机电动驱动。轮毂电机为多电机驱动的电动汽车,相对于普通中置单电机电动汽车在各方面都具有明显的优势,被誉为电动汽车未来发展的最终驱动方式。
1.2 轮毂电机及驱动的电动汽车结构特点
作为纯电动车的一种,轮毂电机驱动的电动汽车由轮毂内的电机驱动。轮毂电机电动车将驱动轮轮毂和电机集成在一起,电机转子固定在轮胎上,电机工作时转子转动同时带动轮胎转动,其结构如图1-1所示。[2]
相对于传统汽车和混合动力汽车,轮毂电机驱动的电动汽车具有以下几个优点:
1)简化汽车底盘结构,降低整车质量。相对于传统汽车,轮毂电机驱动的电动汽车由驱动轮内的轮毂电机直接驱动,动力控制由传统的机械连接变为软连接。通过电信号即
可满足各驱动轮从零到最大车速之间的无级变速和两驱动轮间差速的需求,从而减少了离合器、差速器、变速箱的一系列的传动装置。使汽车底盘部分的布置可以更加灵活,可以搭载超级电容、燃料电池等能源装置。同时降低了整车质量,节约成本。
2)增加传动效率,提高能量利用率。轮毂电机的驱动转矩由搭载的轮毂电机直接输出,相对于传统燃油汽车减少了燃料燃烧时的热能损失,消除了能量经过离合器

图1-1 轮毂电机结构
变速箱、差速器等传动部件的损失。同时更加容易实现车辆的制动能量回收,增加汽车续航里程,提高能源利用率。[3]
3)实现各驱动轮独立驱动。由于轮毂电机驱动的电动汽车的每个驱动轮都可以实现独立驱动,因此可以适应多种驱动方式。将轮毂电机独立驱动技术和四轮转向结合在一起,可以有效减小转向半径甚至可以实现零半径转向。
4)提高响应速度。轮毂电机的输出转矩可以直接作用在驱动轮上,不用经过离合器、差速器等传动装置,因此响应速度更快,间动力性更好。[4]
5)多种动能匹配。就目前来看,电力驱动是大多数新能源汽车的驱动方式。因此,轮毂电机也可以发挥极大地作用。不管是燃料电池汽车、纯电动汽车还是增程式汽车都可以通过轮毂电机驱动。并且,许多新能源车的技术也可以很容易在轮毂电机驱动的电动汽车上实现,如制动回收。
6)降低振动和噪声。对于传统燃油汽车来说,汽车上的振动和噪声主要来源于发动机和传动部分,对驾驶员和乘客的舒适性造成影响。而采用轮毂电机驱动的电动汽车由电机驱动,没有传动系统,电机本身产生的振动和噪声较少,所以对驾驶员及乘客的舒适性影响较小。
1.3 轮毂电机驱动电动汽车国内外研究现状
1.3.1 轮毂电机驱动电动汽车国外研究现状
轮毂电机驱动技术由来已久,F.Porsche早在1900年,就实现了电机装载在轮子上的想法,并且成功制造出了装载轮毂电机的电动汽车。但是由于受到电机与电池技术的限制,并没有实现大规模生产。上世界50年代,美国人Robert发明了一种将驱动用的电机、动力传动系统及制动系统融合为一体的轮毂电机驱动系统。[5]
2003年,美国通用公司研发出了后轮由轮毂电机驱动的轻型电动车。2005年,该公司又推出了搭载了氢燃料电池的轮毂电机电动汽车Sequel。Sequel上的驱动电机有三台,其中一台横向安装的60 kw轮毂电机驱动车辆的前两轮,由两台25 kw的轮毂电机分别独立驱动车辆的后两轮,其四个车轮精确地动态转矩控制使车辆的稳定性和动力性得到进一步提高。并且,该车还具有制动回收的功能。
日本三菱公司在21世纪初就将轮毂电机驱动技术应用到产品Colt EV、四驱跑车Lancer Evolution MIEV以及概念车i-MIEV上。其中,Colt EV每个后轮上都搭载了一个20kw的轮毂电机进行驱动。i-MIEV由后轮安装的两个轮毂电机驱动。四驱跑车Lancer Evolution MIEV则在四个车轮上都装载了轮毂电机,采用四轮独立驱动模式。并且四驱跑车Lancer Evolution MIEV还对底盘进行了重新设置,使得轴荷分布均匀。[6]
日本丰田公司研发出了四轮驱动小型轮毂电机驱动的电动汽车Fine-N。该车搭载燃料电池为动力源,每个电机最高输出功率25 kw,最大输出扭矩110 N·m,轮毂电机通过搭载的燃料电池输出电力驱动,使续航里程高达500 km。
1.3.2 轮毂电机驱动电动汽车国内研究现状
国内的各大车企和高校的研究机构也对轮毂电机驱动技术展开了一系列的研发,并取得一定的研究成果。
同济大学2002年到2005年期间研制了“春晖”系列燃料电池电动车,该系列电动车均搭载四个永磁无刷直流轮毂电机,每个电机都可以实现独立驱动。香港中文大学研制的电动汽车OK-1,每个车轮上都搭载了驱动电机,通过控制四个车轮驱动实现了横向运动和原地转向。[7]除此之外,清华大学、吉林大学以及上海交通大学也在轮毂电机驱动电动汽车的控制策略发面取得了一定的研究成果。
比亚迪公司在2004年车展上推出采取四个轮毂电机独立驱动了概念车ET,该电动汽车搭载两个轮毂电机,0-120km/h的加速时间只需要7s,并且续航里程达到了350km。广汽在2010年广州车展上展出了一款传祺电动车,该车采取后轮搭载了两个轮毂电机,峰值功率可达83 kw,峰值扭矩825 N·m。奇瑞公司在2011年上海车展展出了一款搭载4个336V轮毂电机的电动汽车瑞麟XI-EV,该车可实现制动回收,增加了续航里程。
1.4 轮毂电机驱动电动汽车未来发展趋势
轮毂电机驱动技术在我国刚刚起步,相对于国外,还有较大的差距。目前轮毂电机驱动技术多应用于小型交通工具上,应用于电动汽车还只是在车展中见到,市场上并没有应用了轮毂电机驱动技术的电动汽车。在国外,轮毂电机驱动技术被应用于轮胎生产商、汽车驱动系统生产商和整车及零部件生产商。而在国内,轮毂电机驱动技术仅仅被应用于高校研发团队及少数自主品牌汽车生产商。我国的轮毂电机技术并不成熟,尤其是在高功率、大转矩轮毂电机的生产和应用上远落后于国外。今后轮毂电机驱动技术的研发主要致力于低成本,高效率,电机转速和转矩范围广,可以有效解决抗振和冷却问题。[8]
1.5 本文研究的主要内容
本文主要对轮毂电机电动汽车的动力性进行了研究,对轮毂电机驱动电动汽车的技术特点,发展趋势进行分析。具体内容分为以下几点:
1) 轮毂电机驱动电动汽车的技术特点、发展现状及发展趋势分析。
2) 对轮毂电机驱动的电动汽车进行受力分析,计算汽车在不同工况行驶时轮毂电机的功率需求,电机的转速需求以及搭载的驱动电池的容量需求,根据各方面的需求对电动汽车的动力系统进行参数匹配。
3) 基于Cruise平台建立轮毂电机驱动的电动汽车动力系统模型,对设计的电动汽车动力系统进行仿真。
4) 分析仿真结果,验证动力参数的匹配是否满足整车的动力性需求。
第2章 电动汽车动力学模型分析与计算
汽车动力性是指汽车在良好路面上直线行驶时由汽车受到的纵向外力决定的、所能达到的平均行驶速度。汽车是一种高效的运输工具,运输效率的高低很大程度上取决于汽车的动力性。所以汽车动力性是汽车各种性能中最基本、最重要的性能之一。汽车动力性评价指标主要有汽车最高行驶车速、汽车加速能力和汽车爬坡能力。[9]
2.1 汽车驱动力与行驶阻力
汽车在匀速稳定行驶时其受力方程如下:
(2.1)
式中:为汽车提供的驱动力,是汽车行驶时受到的阻力之和。
汽车驱动力计算公式如下:
(2.2)
式中:为轮毂电机输出转矩,为减速器传动比,因为本文中车辆由轮电机驱动取1,为驱动系统机械效率,为车轮转动半径。
汽车行驶时,受到的阻力主要有轮胎滚动阻力、空气阻力、坡度阻力和加速阻力。汽车行驶时受到真的阻力之和如下:
(2.3)
汽车轮胎滚动阻力表达式为:
(2.4)
式中:为汽车整备质量,g为该地区重力加速度,f为滚动摩擦系数。
汽车行驶时空气阻力计算公式如下:
(2.6)
式中:为行驶时空气阻力系数,A为汽车行驶时迎风面积,u为汽车行驶速度。
汽车行驶时坡道阻力计算公式如下:
(2.7)
式中α为汽车行驶时的爬坡度。
汽车行驶时加速阻力计算公式如下:
(2.8)
式中:为汽车旋转质量换算系数,a为汽车行驶加速度。[10]
2.2 电机参数设计
对于纯电动汽车来说,驱动电机作为其核心部件,为了使电机能更好的与车辆匹配,人们对此提出了更高的要求。[11]轮毂电机驱动的电动汽车将电机置于车轮轮毂中,则要求电机的各方面参数都可以达到最高标准。首先驱动电机应满足高能量密度,轻量化的标准,从而满足电机尺寸要求,降低车辆负载。其次,车辆在不同工况行驶时要经历起步、变速、爬坡多种工作状态,这就要求电机具有较好的瞬态反应能力。通过对比得到永磁同步电机具有较好的启动性能,具有高质量密度及功率密度,可靠性高,可以满足驱动电机高能量密度、轻量化、安全可靠的性能需求。本文中选取永磁同步外转子轮毂电机作为驱动电机。
2.2.1 电机功率设计
该轮毂电机驱动的电动汽车整车基本结构参数及动力性能如下表2.1所示。
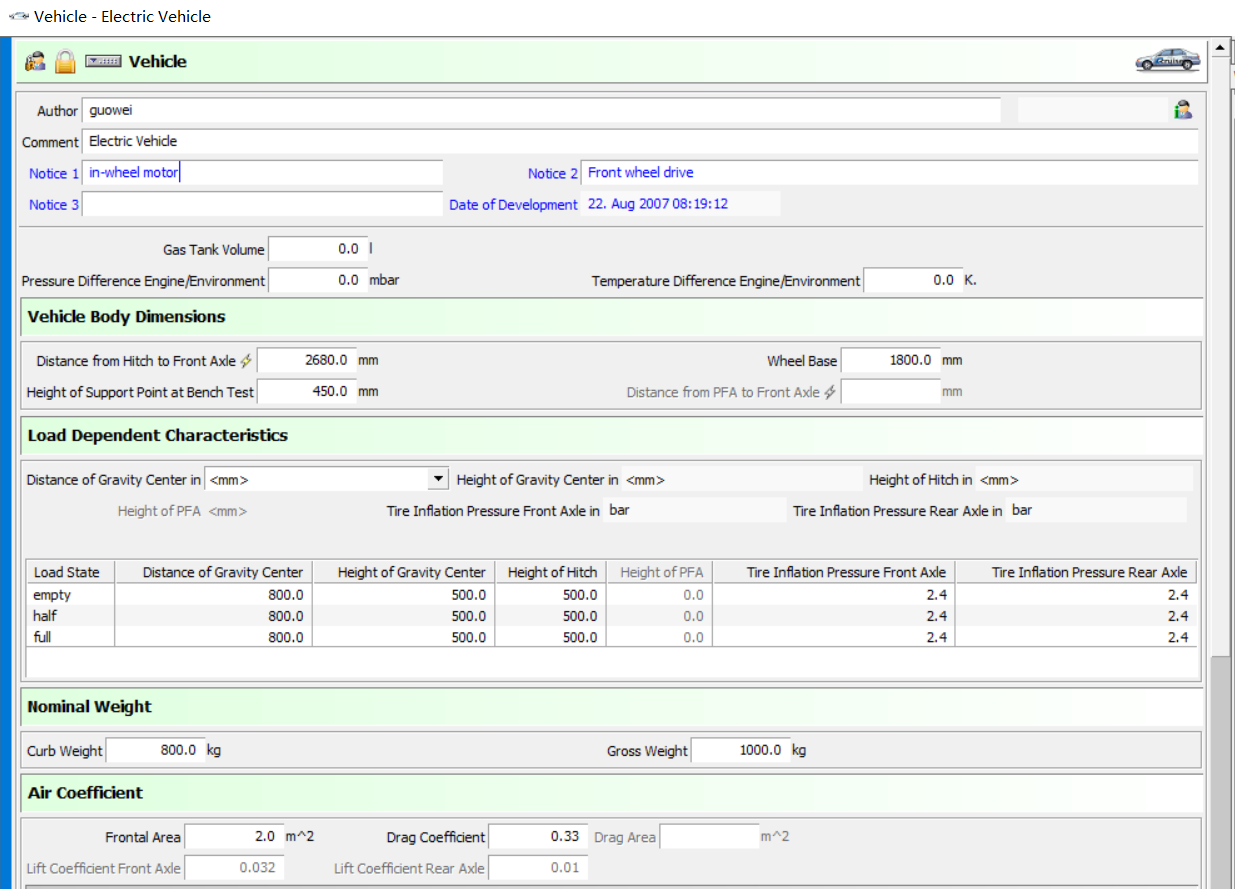
表2.1 整车结构基本参数
整车参数 | 数值 | 单位 |
长x宽x高 | 2680x1550x1542 | mm |
迎风面积 | 2.0 | m2 |
风阻系数 | 0.33 | - |
整备质量 | 800 | kg |
传动效率 | 0.94 | - |
摩擦系数 | 0.016 | - |
轮胎半径 | 0.282 | m |
质量换算系数 | 1.06 | - |
最大爬坡度 | 30 | % |
续航里程 | 200 | km |
爬坡速度 | 30 | km/h |
最高车速 | 120 | km/h |
百公里加速 | 10 | s |
根据汽车在最高车速下匀速行驶时确定的电机最大功率计算方法如下:
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: