低成本天线姿态估计融合惯性传 感和双天线全球定位系统车载的移动卫星通信外文翻译资料
2022-09-07 14:47:38
英语原文共 13 页,剩余内容已隐藏,支付完成后下载完整资料
低成本天线姿态估计融合惯性传
感和双天线全球定位系统车载的移动卫星通信
摘要
在本文中,我们开发了一种低成本的方法确定车辆姿态车载卫星通信(SATCOM)-在移动(SOTM)使用微惯性测量单元(MIMU)和一二天线的全球定位系统(全球定位系统)。一种自适应的欧拉角的基于无迹卡尔曼滤波器(UKF)来融合这些传感器保护由全球定位系统中断和车辆加速度引起的影响。当两只天线的全球定位系统可以提供车辆偏航角,车辆的加速度,引入大错误测量重力加速度可校正由GPS测量的速度和侧滑角。当双天线定位系统未能提供偏航角和所需信息,偏航角是只有将陀螺仪估计。自适应控制的俯仰和滚动角的估计由车辆加速检测规则。这些规则充分使用陀螺仪输出和滤波结果,这是与车辆使用比传统的加速度计更兼容基于规范的规则。所提出的方法进行验证的驱动试验表明这一技术是低成本的一个可行的出路。
关键词:自适应卡尔曼滤波,姿态估计,全球定位系统(全球定位系统),惯性测量单元(IMU),卫星通信(卫星通信)系统,传感器融合。
1. 引言
从一个移动的宽带连接的需要在过去的几年里,汽车已大幅增加军用和民用用途。为了满足这一增长需要,在移动卫星通信(SOTM)可能是最好的选择目前。这项新技术使指挥官有效执行作战指挥任务,而在没有命令时,它保持语音和数据连接在移动,它提供了近实时战场信息。有了这项新技术,民用用户可以受益于高速全球数据通信和可靠真正的宽带连接的移动,所有的允许旅客上网或看电视工作或个人娱乐。此外,对于急救车很重要的一点,如警察,消防,和搜索—救援平台。建立一个成功的卫星链路。随着车载“动中通”发展,最大的挑战之一就是保持精确瞄准卫星的同时车辆运动。系统必须保持直线卫星和天线之间的视线和偏振匹配。Ku波段SOTM,轨道位置之间的角度的目标卫星和主瓣的轴线天线,这是已知的姿态精度要求,不应超过0.5°。然而,不断变化一个移动的车辆的态度严重影响天线指向和跟踪。出于这个原因,大多数的SOTMs雇用高精度,但非常昂贵的态度和标题参考系统(AHRS)满足精度要求,例如,用于SOTM终端开发霍尼韦尔塔林由L-3通信。捷联航姿系统的高成本“动中通”的应用范围。因此,它是至关重要的和开发低成本、高精度的姿态估计系统(AESS)。
许多以前的作品对低成本的态度估计专注于廉价的传感器的融合,包括基于微机电系统(MEMS)陀螺和加速度计,磁力计,和全球定位系统(全球定位系统)。陀螺仪可以集成提供角度但受陀螺仪诱导的累积误差的影响偏见。加速度计可以提供俯仰和滚转角如果车辆是静止的,通过测量重力向量或以恒定的速度移动。基于加速度计的姿态是无漂移,但受振动噪声和车辆加速度。磁力计广泛用于偏航角测量,这是受大扰动附近的铁磁性生存和磁场环境。多基线全球定位系统可以通过使用载波相位来确定姿态微分技术。然而,它受到来自信号堵塞和低更新率。因此,它是有意义的融合这些传感器的精确姿态。AES主要关于融合算法,不考虑外部加速度和磁场干扰,这是不切实际的车载“动中通”。提出了一种自适应滤波器估计外部加速度并改正它们。自适应算法的基础上的协方差匹配方法,它本质上是一种粗糙的方法,准确的态度由于窗口的创新序列不能估计准确捕捉车辆动力学。外部加速度处理切换方法,态度是只有将陀螺仪如果外部估计检测到加速度。切换规则利用加速度计输出与值的比较重力来检测车辆加速度(加速度计规范为基础的规则。然而,对于陆地车辆的应用,这方法是不够的,以适应复杂的动态车辆。在,使用pseudoattitude衍生法从单天线的全球定位系统有大的错误,不能满足指向精度要求的“动中通”。
惯性导航系统/全球定位系统集成还可以提供使用高性能惯性传感器的精确姿态。然而,低成本的惯性传感器具有低精度的废墟集成算法。此外,偏航角估计如果车辆没有加速度,将是不同的。此外,复杂的融合算法是不可行的约束计算功率的紧凑型“动中通”安装在车顶。减少部分惯性测量单元(IMU)全球定位系统的车辆姿态估计算法对于防撞系统,提出了在。这种方法可能与在提出的具体应用程序兼容但与“动中通”因为其较低的精度和鲁棒性。
在本文中,我们引入了一种新的车辆AES。建议技术结合了一个微机械陀螺三和弦和一个微机械加速度计与一二天线定位系统保持天线指向所需的卫星准确。由于车辆加速度是主要的干扰俯仰和滚转角测量和双天线定位系统容易受到阻碍,我们充分利用这些传感器并根据工作情况进行融合卫星定位系统的状态。当两只天线的全球定位系统可以提供偏航角,车辆加速度得到纠正利用GPS测量的速度和侧滑角。当两只天线不能提供偏航角由于障碍物,偏航角估计陀螺仪集成,和俯仰和滚动角估计由自适应UKF。自适应方案的基础上的车辆加速度检测规则。这些规则与转弯率测量和加速度预测,产生了比加速度计更好的性能基于规范的规则。与其他现有的方法相比,所提出的混合估计方案的优点如下:1)它提供了更精确的偏航角估计采用双天线GPS;2)侧滑角是更精确的车辆加速修正;3)更灵活和可靠的开关规则的自适应滤波。
本文的其余部分组织如下。在第二节,我们提出了“动中通”天线的AES一些预备知识。第三节提供了一个简短的概述的态度估计不同传感器的方法。第四节介绍的多传感器融合算法。对AES的效果通过现场测试,这是在第五节进行验证。最后,第六节总结了论文。
- 准备
在这里,AES的配置简介,的概念,和所使用的算法在整个其余的本文介绍。
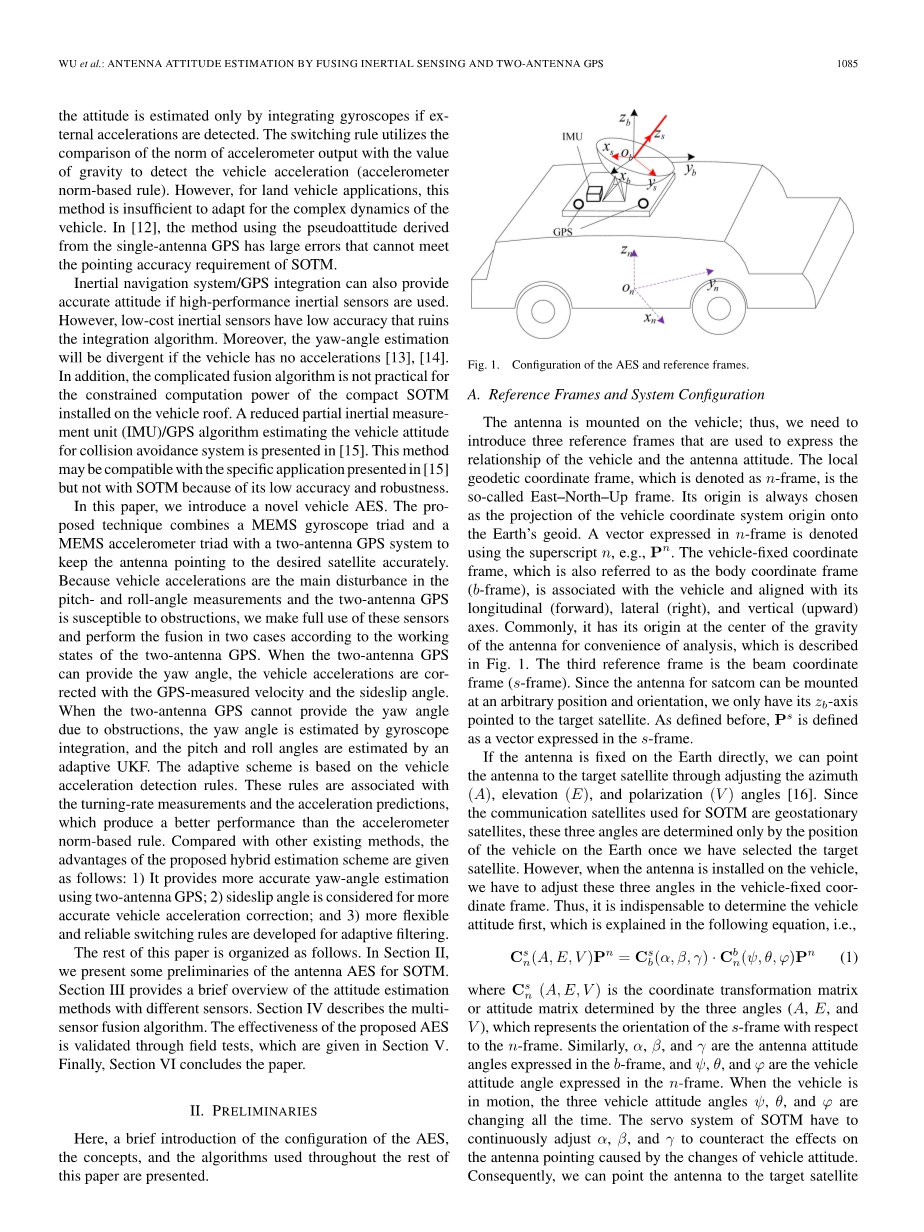
图1 AES和参考帧结构。
天线被安装在车辆上,因此,我们需要介绍三个用于表示的参考帧车辆与天线姿态的关系。当地的大地坐标框架,这是表示概念,是所谓的东方,北方的框架。它的起源总是选择作为车辆坐标系原点的投影地球的大地水准面。用矢量表示的概念用上标氮,例如,伪随机。车辆固定坐标帧,也被称为身体坐标帧(视频),与汽车和与其相关的纵(向前),横向(右),垂直(向上)轴。通常,它起源于引力的中心为便于分析的天线,这是描述在图1。第三参考帧是波束坐标系框架(硫帧)。由于卫星通信天线可以安装在任意位置和方向,我们只有其ZB轴指向目标卫星。在定义之前,定义在硫帧表示向量。
如果天线是固定在地球上,我们可以点天线对目标卫星的方位调整(一),标高(电子),和极化(五)角。自用“动中通”通信卫星是静止的卫星,这三个角度是由位置决定的在地球上的车辆,一旦我们选择了目标卫星。然而,当天线安装在车辆上,我们必须在车辆固定坐标系中调整这三个角度框架。因此,它是不可缺少的,以确定车辆首先。
在CSN(A,E,V)的坐标变换矩阵或姿态矩阵由三个角度确定(1,电子,和V),这是相对于硫帧定位的概念。类似地,有:天线姿态角度表达在B帧,和psi;,theta;,和ϕ是车姿态角的概念表达。当车辆在运动中,三的车辆姿态角psi;,theta;,和ϕ改变所有的时间。“动中通”的伺服系统有连续调节的的的的的,和的,和的,以抵消作用由车辆姿态变化引起的天线指向。因此,我们可以点到目标卫星的天线准确,只有当车辆的态度可以准确地估计。因此,估计天线的姿态被转换成车辆的姿态。
估计车辆的姿态,我们利用amems IMU和一二天线全球定位系统。所有这些传感器都固定在车辆上屋顶。传感轴IMU与B帧对齐轴,和基线的双天线的全球定位系统是平行的Y轴的B帧。
有几种可能的态度表示使用汽车运动,如欧拉角、四元数,和Rodrigues公式。根本的问题是,表示在特定的应用程序中是数或冗余的。欧拉角是最小的表示,没有冗余但奇点时的俯仰角是近plusmn;90◦。然而,这种奇异性不会发生的土地车辆使用。因此,我们选择了欧拉角参数的车辆姿态。
如前所示,姿态矩阵n(psi;,theta;,ϕ)反映从概念到B帧是由三个欧拉确定的角度,包括偏航(psi;)、螺距(theta;)、乐(ϕ)角度这是由:
因为欧拉角运动涉及三角函数的功能,我们选择的无迹卡尔曼滤波(UKF)来实现姿态估计的非线性滤波算法。UKF能捕捉状态至少二顺序,不需要计算的矩阵,这是优于最广泛使用的扩展卡尔曼滤波。适度的计算复杂度使得它是可行的实时执行数字信号理器(数字信号处理器)。
UKF算法应用于非线性离散下列形式的系统:
在XK是状态向量,YK是测量的矢量,是一种非线性函数,是一种非线性函数功能测试和omega;K和upsilon;K的过和测量噪声的协方差了QK和RK,分别。我们简要地介绍了UKF算法在这里。UKF算法实现递归如下。
- 时间更新:
2)测量更新:
从这2个步骤中,我们可以看到,均值和协方差是通过真正的非线性方程的传播指定的样本称为西格玛点,线性化是不必要的。
3.由不同传感器确定的态度
方法来估计使用不同的传感器的态度是在这里介绍:1)来自整合的三个角度陀螺只有;2)的俯仰角和滚动角估计加速度计;3)由twoantenna测量偏航角GPS。
陀螺仪是用来测量角速度,和通过积分陀螺仪可以得到姿态角测量参照(4)。然而,大的不确定性在低成本MEMS陀螺仪的输出产生较大姿态误差,即使在很短的时间间隔。一种广泛使用的陀螺仪模型。
在omega;M测量角速度,omega;T是真角速度由一个缓慢的随时间变化的偏置和一个添加剂测量噪声eta;omega;,eta;B是白噪偏置变化缓慢,和eta;omega;和eta;B是独立的zerom高斯白噪声的方差sigma;2omega;过和sigma;B。整合低档陀螺仪将直接诱发无限的角度误差随时间累积的缓慢时变偏置B,因此,只有短期精度可以利用陀螺仪实现。
该捷联式加速度计黑社会可以测量车辆如果加速度被认为是一种干扰的话和引力向量作为目标变量,我们要测量。考虑到帧变换,我们可以模型加速度计的输出a
g代表重力加速度,一个车身是车辆加速在概念的表达,作为g=9.81 m/s,代入(2)到(7),得到下式:
如果车辆是静止的或移动的一个恒定的速度,身体=0、重力加速度是加速度的唯一来源。在这种情况下,沥青(theta;)乐(ϕ)角度可由测重力加速度。该方法的姿态误差不会随着时间的增加;因此,该方法具有长期精度。然而,车辆加速身体不能始终保持。由加速度计估计的姿态不可避免地受到加速度干扰造成的由车辆的移动。因此,它是正确的关键这一方法的车辆加速度。
双天线全球定位系统(也称为单基线定位系统)被使用利用载波相位差分提供精确的偏航角技术时,这两个全球定位系统的天线都捕获五或更多的相同的卫星同时。不同于常用的使用一个天线的全球定位系统,单基线全球定位系统很容易被通过障碍物,如树木、建筑物、立交桥的影响,甚至是光杆。在许多情况下,视线的视线卫星是很好的维护,但这两家天线的全球定位系统不能提供偏航角和精确的速度,由于障碍物。因此,我们需要照顾它的工作状态时使用双天线全球定位系统。作为两家天线的全球定位系统,我们希望要重新定义全球定位系统的故障,提供偏航角测量。
当两只天线的全球定位系统可以提供车辆偏航角度,也可以提供另一个重要的变量:车辆速度和侧滑角。侧滑角速度和车辆之间的差异标题,因此,它可以很容易地获得的情况下,当车辆偏航可用。然而,在全球定位系统中断,车辆横摆角和侧滑角将不可用,和车辆的速度将有很大的噪声。解决使用每个传感器所遇到的问题单独和准确估计车辆的态度,我们是鼓励在提出了一种多传感器融合方法。
四、多传感器融合
如前面所指出的,陀螺仪为基础的方法具有短期精度,而加速度计和全球定位系统的方法有长期准确度。采用这种互补特性,我们可以得到一个混合的输出具有短期精度和长期精度。然而,有2个关键问题,我们会遇到什么时候实施融合。首先是车辆的加速度一个身体介绍(8)。其次是全球定位系统中断。使等于一个等于一个身体对加速度计读数,一种有效的解决方案是使用全球定位系统测量的车辆速度和侧滑角估计车身加速度。然而,这种修正将不可用,如果全球定位系统中断发生。作为结果,两者的问题都需要融合的不同情况下,根据不同的情况GPS状态。
如果双天线定位系统可以提供偏航角测量,它还可以提供车辆的速度vn体。因此,车辆加速身体可以计算区分VN体。而,加速度计输出M表现在B帧,但体计算的概念;除了计算,不方便做一次修正同时在B帧的车辆加速度。注意车辆加速度分为2类。第一类是纵向加速度到身体起源于加速或下降,这对俯仰角测量的影响。另一种是横向加速度ABX体产生车辆转弯,影响滚动角测量。自车辆速度vn可以用天线测量身体全球定位系通过下式:
五.结论
我们提出了一种低成本AES安装车用低品位的MEMS陀螺仪和加速度计SOTM,以及一二天线全球定位系统。背后的基本理念机械化技术的描述是充分利用测量不同的传感器;因此,它基本上是一个混合的信息融合过程。陀螺仪的融合辅助系统(加速度计和双天线全球定位系统)结果在混合的输出,具有短期的精度(由于对陀螺精度)和长期(由于辅助系统)。帮助系统的缺点是克服自适应滤波的切换规则。
测试结果表明,传感器融合算法能成功处理引起的累积误差陀螺仪的偏差,加速度计的干扰引起的车辆加速度和天线信号的堵塞GPS系统。当两只天线可以提供偏航角度、姿态估计误差总是小于0.5°,会议“动中通”的精度要求。然而,这错误可能会增加超
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[146623],资料为PDF文档或Word文档,PDF文档可免费转换为Word



