脉冲型死区补偿作用的PWM电压逆变电路外文翻译资料
2022-09-08 12:39:25
英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
脉冲型死区补偿作用的PWM电压逆变电路
作者:David Leggate, Member, IEEE, and Russel J. Kerkman, Senior Member, IEEE
摘要:死区时间对于防止PWM电压逆变器同一桥臂同时导通是有必要的,但死区时间也会造成输出电压误差。虽然单个误差非常小,但积累一个周期后该电压误差足够使输出波形畸变。本文论述了一种纠正由死区时间引起误差的方法,即脉冲型死区补偿。该方法相比其他方法而言,其优点是软件集成度更高,所需硬件模块少,成本低。 脉冲技术是通过分析死区对每个脉冲造成的误差并根据其对每个脉冲进行校准。该技术通过仿真和物理实验证实效果良好,另外并对目前其他方法进行评估并将结果与本文所提出的方法进行比较,对比结果显示其他补偿方法在外加电压源的时候会对输出波形的幅值和相位产生偏差,而本文所设计的方法的实验结果则显示无明显的输出波形幅值和相位偏差。
关键词:死区时间(DT),不稳定性,功率半导体设备,基于脉冲的死区补偿(PBDTC)
开启延迟(TD),非对称脉冲
1 绪论
在电机控制领域,目前常见的电机控制方法是通过PWM电压源逆变器驱动产生频率幅值可调的电压控制电机终端。作为功率开关器件,当其在开关转换状态时,为了防止同一桥臂的开关同时导通,通常需要设置一个死区时间。 虽然死区时间非常短,但它会对期望输出基波电压产生畸变。虽然每次单个畸变对输出的基波电压产生的影响不明显,但最终叠加的误差会减小输出基波电压,产生电流畸变和转矩脉冲。为了解决PWM信号死区时间补偿问题,目前电子工业已经着重研究该问题[1]–[3],并已经给出了几种死区时间补偿方案[4]–[10]。但各个解决方案也都有各自的不足之处,比如某个死区时间补偿交流驱动设备可能在带有交流电机的风机或者水泵系统中表现稳定,但却在载有交流同步交流磁阻机的纺织应用系统上表现的差强人意。相比于整马力驱动设备,分马力驱动设备所呈现的由死区效应引起的不稳定程度要小一些。因此,这将导致可能会掩盖相关死区时间效应所引起的固有问题。
本文论述了一种死区时间补偿技术,即脉冲型死区补偿作用的PWM电压逆变电路 (PBDTC)。该技术可以补偿校准因死区时间效应引起的PWM输出电压波形失真。脉冲技术是通过分析死区对每个脉冲造成的误差并根据其对每个脉冲进行校准。该技术通过仿真和物理实验证实效果良好,另外并对目前其他方法进行评估并将结果与本文所提出的方法进行比较,对比结果显示其他补偿方法在外加电压源的时候会对输出波形的幅值和相位产生偏差,而本文所设计的方法的实验结果则显示无明显的输出波形幅值和相位偏差。
2死区时间效应引起的输出电压畸变
当交流异步电机、同步磁阻电机或者同步永磁电机采用开环运行的可调变频驱动设备时,在一定的频率范围和负载条件下,可能会出现系统的不稳定性。引起这些不稳定现象的原因可能是一些固有的低频率电机所引起的不稳定性,不稳定性的程度取决于电机与pwn逆变器之间的相互作用,或者PWM生产方法和驱动策略的选择。
当交流用电设备被逆变交流电压源驱动时,其所施加的定子电压波形含有由PWM算法所生产的谐波成分。电机系统的稳定性会受这些谐波所影响,特别是在低频空载的情况下,会造成附加的设备消耗损失并降低电机效率。上述的严重程度取决于所施加的电压中的高次谐波成分的多少。大量的谐波会加剧电机发热和转矩脉动,即使最小的基波只是基波的百分
图2
之大小,当与马达耦合时,可能会导致运行不稳定。PWM策略的选择对于能否将电压和电流谐波最下化是极其重要的,PWM策略的缺陷将会导致电动机终端的供电电压产生畸变,并且会因为逆变器正常工作必须附加的死区时间的存在而放大加剧。
目前逆变电路常用的高速功率开关电力电子器件有绝缘栅极双极晶体管(IGBT),电力场效应晶体管(MOSFET),高开关频率(5—15千赫兹)往往只需要很小的死区时间(大概2-5微妙的面积)将不会摆脱系统的不稳定性问题,在较高的开关频率下可以通过提高谐波的平率来提高输出电压波形的质量,但是低频次谐波可能会因为死
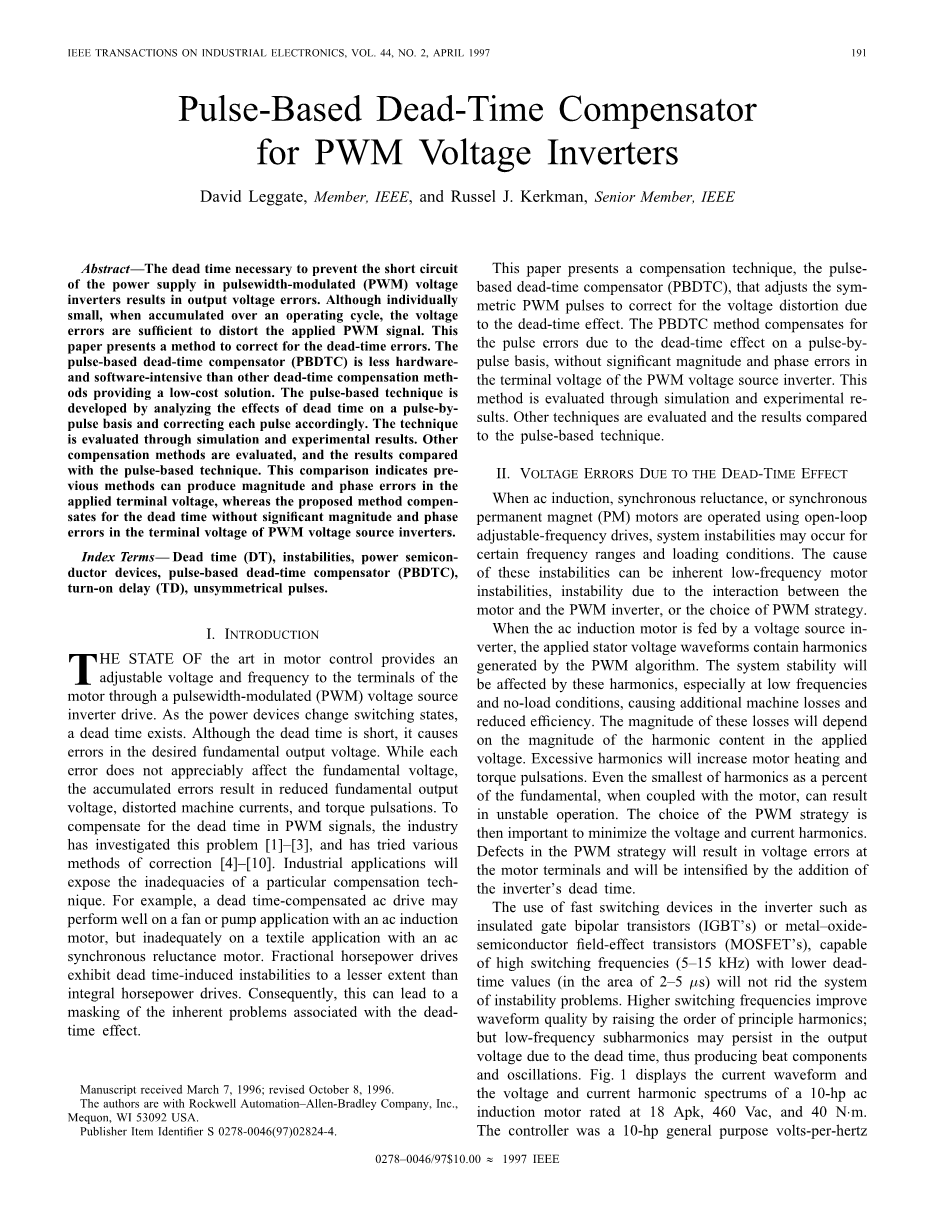
图1 区时间而持续存在于输出波形中,因此会产生节拍分量和振荡。图1显示的是一10马力,额定功率为18APK,电压为460VAC,转矩为40N.M的交流异步电动机的电流波形和交流电压、电流谐波频谱。该控制器是一个10马力的通用伏特变频控制器,每次变频步进值为15HZ,正常运行在4KHZ的载波频率(fc),并且对于死区时间无补偿。在空载状态下,电机的电流失真程度是13APK,并伴有严重的转矩脉动。这些不稳定的地区范围很广,遍布不同的机帧大小和操作要点。图中的电流电压谱显示次谐波的频率在6.5HZ。电流谐波是基波电流的50%。一般情况下,大多数的交流电机不会持续的运行的空载状态,但是在许多的应用场合需要轻载或者空载的时间作为电机运行过程的一个过渡过程。正是在这些过渡过程的周期里,系统存在的不稳定性或严重影响电机运行的稳定性。逐渐提高负载可以提高系统运行的稳定性,但往往需要达到满载条件下才能保证稳定性。输出电压会变得很低,通过增大电流来供给负载运行会使效率下降。在图1所示的情况下,电机所加的负载为三分之二满载(26N.M),系统处于稳定运行状态。
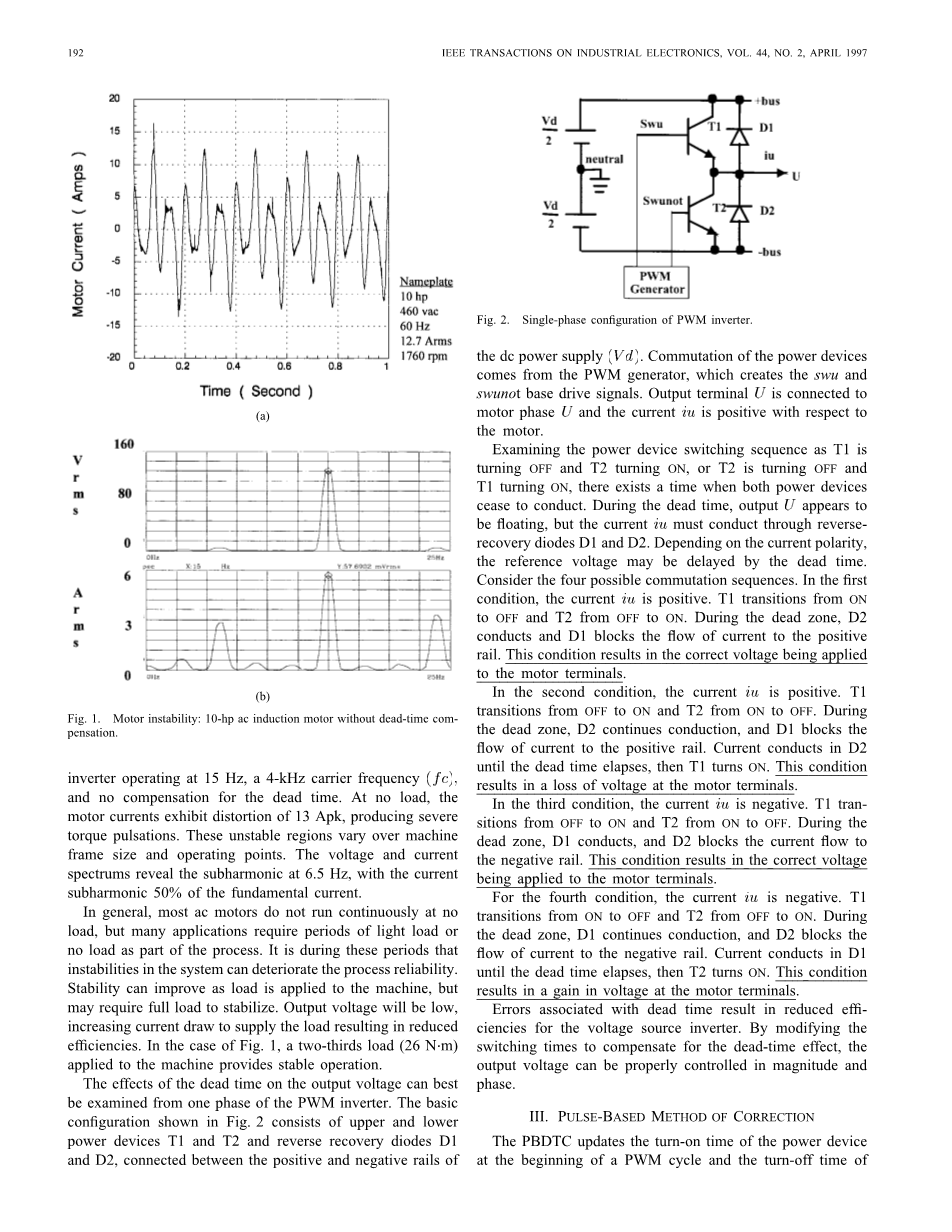
死区时间对输出电压波形的影响能在单相PWM逆变电路中得到最明显的反馈,图2所示的就是单相PWM逆变的典型电路。该电路由上下两个功率开关器件T1、T2和两个反向恢复二极管D1、D2组成,并加在直流电源的正负两极,这就组成了最简单的逆变电路。功率开关器件的通断换流是通过PWM发生器实现的,由PWM发生器产生高低电平作为驱动信号。输出电压U和电机相位U有关,电流IU相对于电机来说相位是正的。
检查功率开关器件确保当T1开通时T2关断,或者T2开通时T1关断。在实际应用中,为了防止桥臂上下开关器件同时开通造成短路,需要设置死区时间。在死区时间内两个开关器件均处于关断状态。在死区时间内,输出电压U开始下降,但输出电流iu 必须通过反向恢复二极管D1、D2回流,根据当前电流的极性,电压可能会受死区时间影响有延迟现象。现在考虑四种可能的换向序列。第一种情况,电流iu是正的,开关T1由开通变为关断,开关T2由关断变为开通。在死区时间内,D2导通D1截止,电流反馈给直流侧。这样的情况使得电机终端能够得到正确的供电电压。第二种情况,电流iu是正的。开关T1由关断变为开通,开关T2由开通变为关断。在死区时间内,D2继续导通,D1阻止了电流流向正极通道。D2持续导通直至死区时间消失,T1导通,这种情况使得输出到电机端的电压受到损失。第三种情况,电流iu是负的。开关T1由关断变为开通,开关T2由开通变为关断。在死区时间内,D1导通,D2阻止电流流向负极。这种情况使得输出到电机端的电压是和预期相符的。第四种情况,电流iu是负的。开关T1由开通变为关断,开关T2由关断变为开通,在死区时间内,D1继续导通,D2阻止电流流向负极。D1持续导通直至死区时间消失,T2导通,这种情况使得输出到电机端的电压受到损失。
死区时间的存在会使得逆变电压源的效率下降,通过修改开关时间以补偿死区时间造成的影响,该输出电压可以在幅值和相位上被适当的控制。
3 基于脉冲的校准方法
PBDTC在每个PWM周期的开始时候更新开关器件的导通时间,在PWM周期中间的某个时刻由软件对器件的关断时刻进行控制。PBDTC是基于电流极性的校准方法,与工作状况或载波频率无关。这种方法不需要电流相位检测,从而消除了其他方法的A / D转换器和软件开销。构造简单的电流极性检测装置与数据总线对接,这使得它与微处理器或者DSP的I/O架构兼容,所以构成了低成本性价比高的死区时间补偿器。
图3描述了当电流iult;0和iugt;0的时候PBDTC的脉冲时间校准方法。图3(a)所示的是驱动开关T1从开通到关断或从关断到开通的理想脉冲波形。当IUgt;0时,图3(b)显示的是当理想的脉冲波形没有对死区时间进行补偿时,实际脉冲波形中有因死区造成的误差作用。为了校准误差,由软件算法
图3 调整脉冲时间。在死区时间生产非对称脉冲之前,提前附加一段时间脉冲,如图3(c)所示。提前附加的这段脉冲将会通过死区生成器然后应用到电机终端。校准之后实际的脉冲波形如图3(d)所示,它与图3(a)所示的理想脉冲具有相同的宽度(占空比)和相位。 当iult;0,时图3(e)显示的是当理想的脉冲波形没有对死区时间进行补偿时,实际脉冲波形中有因死区造成的误差作用。为了校准误差,由软件算法调整脉冲时间。在死区时间生产非对称脉冲之前,提前减少一段时间脉冲,如图3(f)所示。提前减少的这段脉冲将会通过死区生成器然后应用到电机终端。校准之后实际的脉冲波形如图3(g)所示,它与图3(a)所示的理想脉冲具有相同的宽度(占空比)和相位。
PBDTC校准技术和其他校准技术相比,它占用了最小的软件代码空间,其原理是通过角度计算确定校准电压指令所需要的电压幅值和相位[5]-[8]。这一优势使得用户能为其他控制功能用更多的处理器。PBDTC具有根据不同导通和关断特性的功率器件而合理调节开关死区时间的能力,因此消除了对功率器件进行评估的需求。
4不同补偿校准方法的对比
当前的死区补偿方法有电压补偿和电流反馈补偿两大类。波形校准是基于一种平均值理论,损失的电压在一个操作周期内被算出平均值然后矢量地附加到电压补偿指令当中[4]–[7]。一种较新的技术使用PI调节器[8]调节补偿时间,还有的方法是通过检测电流的功率方向,对于高性能电流调节器使用的是前馈方法[10]。增加的数字微控制器的计算能力使得硬件校准技术可以对波形发生器进行控制处理。
A电压补偿类型
据相关文献表明[4],硬件补偿从逆变器的输出端根据电流极性对电压相位的变化进行检测。逻辑信号是为了提前换向测量正负电压相位,并被存储在一个计数器里。存储的时间数据通过闭环控制反馈,补偿开关器件的相位角。虽然实际的延迟时间被考虑在内,但该方法是补偿下一个脉冲,从而在输出电压波形上产生了电压的相移。
在文献[8]中提出的方法是用调整补偿时间策略补偿死区效应和电力设备效率。首先,将功率器件的电气特性在器件电流的线性函数中建模,最终在反馈回路中进行补偿。这种模式结合了开关器件的电气特性,生成电压反馈信号。这个信号与参考电压信号相比较通过PI控制器来调整补偿参考时间,因此,需要生成一个同样的逆变输出电压作为参考电压。该技术需要的电流为“井然有序”的,言外之意是使用电流调节器。这种方法可以产生和理想脉冲相同的脉冲,但会导致脉冲时间的移位。
B电流反馈型补偿
图4
电流反馈补偿器采用电流反馈信息创建一个叠加了参考电压的误差电压矢量。误差电压等效于基波信号的分量,其幅度补偿秒级别的电压损失。一种方法通过方波电压值或者平均值(AV)计算电压误差幅值作为载波、死区时间(Td)的周期函数(tc),总线电压(Vbus)。误差电压的幅值计算公式为:
(1)
误差电压矢量的相位角等于反馈电流的相位角。加入补偿电压矢量的参考电压矢量产生三相对称基准电压信号[7]。
如果用一个等效的方波来表示一个周期内的误差脉冲电压的伏秒,所得的六阶基波分量,可以被添加到基准值,可表示为:
(2)
图4所示的是包含校正调制信号的序列信号。图4(a)是参考波VAS,图4(b)所示的是等效六阶相电压vaerr,表示的是由于死区时间损失的电压。图4(c)所示的是误差电压的基波vafund,图4(d)所示的是校正的信号(vas)和原始参考信号(vas),明显地描绘了调制信号的相移现象。这种补偿技术是建立在修改基于参考调制信号平均值的基础上,这种方法有一个固有的延迟现象,附加的补偿增加了基于fe fc td和增益调节的脉冲时间。位置偏移的影响体现在输出电压的基波。
死区时间校正更准确的方法是求矢量和的方法。此方法类似于AV方法,但需要更多的计算以确定损失电压的基本组成部分。该误差电压的幅值由以下计算公式确定:
,
, (3)
误差电压矢量的相位角等于反馈电流的相位角
上述提到的死区补偿方法可以适当的校正由交流电机死区效应所造成的输出电压畸变现象。其中一些解决方案成本昂贵,需要专用的硬件和大量的计算时间。电压补偿技术和电流反馈补偿技术都应用于脉宽调制,但都存在基本电压分量移相的缺陷。
5 PBDTC技术的实施
PBDTC技术由因特尔80C196MC微处理器实现,它包括一个内部的中心型[11]PWM生成器。补偿死区效益是通过调节脉冲波形来实现的,以纠正增益或脉冲时间的损失。该方法与操作方法和载波频率无关,但是依靠电流的极性。
图5详细介绍了PBDTC的原理框图,为简单起见,我们只讨论相位切换信号的产生。校正的调制决定于上/下计数器CNT的状态,其中递减计数达到设定值时开关被导通,向上计数达到设定值时开关被关断,同时电流极性也发生变化。这些条件语 图5
句通过加减法或者不进行校准来确定脉冲时间的补偿校正。由软件算法生成期望的理想的脉冲波形。预定值被装入死区控制波形发生器。U相电流检测器不断地
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[146366],资料为PDF文档或Word文档,PDF文档可免费转换为Word



