单片机实现多路脉冲宽度调制设计毕业论文
2020-02-17 23:22:08
摘 要
本文介绍了一种利用AVR单片机的高速处理特性来实现多路PWM的方法。AVR单片机具有高性能、高速度、低功耗等特点,并且AVR单片机片内集成了多种频率的RC振荡器,看门狗、启动延时等功能,这种集成度可以使我们在设计电路时更加简单。虽然AVR单片机芯片有快速PWM、相位修正PWM模式,但最多只能进行4路输出,本次设计介绍了利用I/O进行6路以上的PWM输出,并且波形稳定,频率可调且快速。本次的设计特色在于电路和程序的简单,便于人工的修改和控制, 硬件上仅用ATmega16的最小系统就能够完成多路PWM输出。
关键词:AVR单片机,多路PWM,ICCAVR,ATmega16
Abstract
This paper introduces a method of realizing multi-channel PWM by using the high-speed processing characteristics of AVR microcontroller. Compared with other single-chip microcomputers, AVR microcontrollers are characterized by high performance, high speed, low power consumption, and integrated AVR microcontrollers. The frequency of the RC oscillator, watchdog, start delay and other functions can make the circuit design simple and straightforward. Although the AVR microcontroller chip has a fast PWM and phase-corrected PWM mode, it can only perform up to 4 outputs. This design introduces more than 6 PWM outputs using I/O, and the waveform is stable, the frequency is adjustable and fast. This design feature is simple circuit and program, easy to modify and control manually, the hardware can only use the minimum system of ATmega16 to complete multi-channel PWM output.
Key word: AVR microcontroller, multi-channel PWM, ICCAVR,ATmega16
目录
摘要 I
Abstract II
第1章 绪论 1
1.1PWM技术简述 1
1.2选题意义及应用 2
1.3国内外研究的现状 2
1.4本章小结 3
第2章 多路PWM分析与设计 4
2.1 多路PWM功能分析 4
2.2 多路PWM结构设计 4
2.3 多路PWM实现及器件的选择 5
2.3.1 单片机的选择 5
2.3.2 AVR单片机的优点 6
2.3.3AVR单片机中断的实现 6
2.3.3ATmega16PWM模式的实现 7
2.4 本章小结 8
第3章 多路PWM硬件电路设计 8
3.1ATMEGA16芯片的选择 8
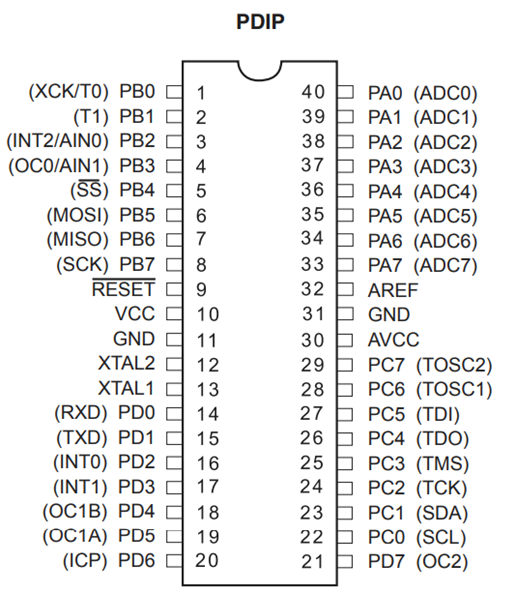
3.2ATmega16引脚介绍 9
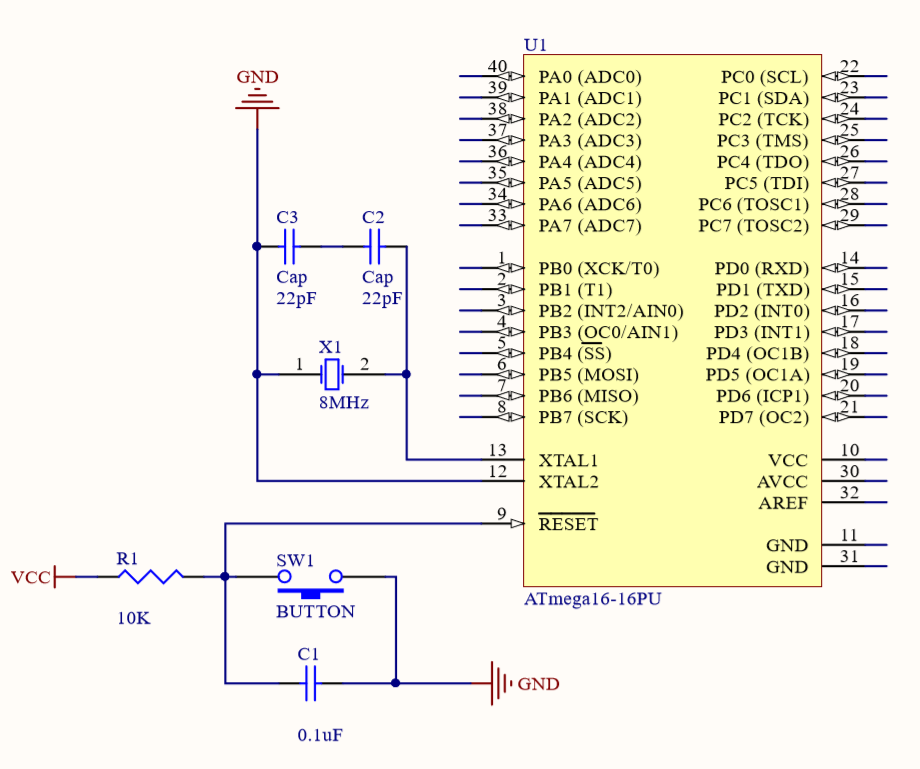
3.3ATmega16系统的原理图设计 9
3.4本章小结 10
第4章 多路PWM软件实现 11
4.1多路PWM实现应用的软件介绍 11
4.1.1ICCAVR 11
4.1.2AVR studio 11
4.1.3 Proteus 11
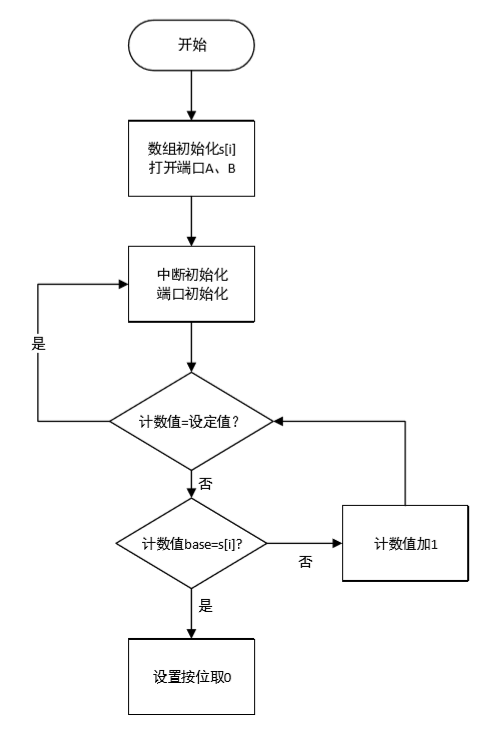
4.2系统软件流程 12
4.3本章小结 13
第5章 算法设计与系统仿真 13
5.1算法设计 13
5.2程序编写 14
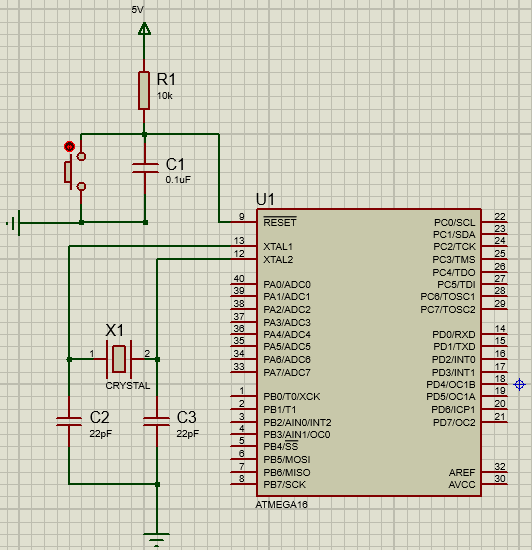
5.3Proteus仿真 15
5.4本章小结 16
第6章结论 17
参考文献 18
附录: 20
致谢 22
绪论
1.1PWM技术简述
随着现代电子技术飞速发展,PWM技术也得到了较大进步。PWM技术是现代电子技术最普遍的控制方式,其具有操作简便,响应性能高而被广泛应用于许多领域。PWM技术,即脉冲宽度调制,就是对逆变电路的通断进行控制,使得输出端得到一系列的幅值相等的脉冲。
最初模拟电路是由模拟信号控制的。模拟信号在时间和幅度的分辨率都没有限制,它会随着时间发生变化,并且可取任何值。这确实可以对一些模拟电路进行不精确的控制,但是模拟信号虽然看起来直观简单,但是它会有各种各样的问题,例如,模拟电路容易随时间出现漂移现象,难以精确调节,而想要更精确的模拟电路就会使电路变得复杂,成本昂贵。
PWM是一种由抽样采集理论发展而来的脉冲波。根据抽样采集理论,每隔一段时间进行抽样,将间隔时间内的波形的面积等量转换为方波信号。PWM具有数字性,虽然PWM是用来代替模拟信号进行输出出入的控制,但是PWM信号是间断的、不连续的,并且只有0和1两个电位。通过利用数字信号来控制电路,不仅可以精准的控制电器的开关,还可以抑制模拟电路中的漂移现象,提高了电路的稳定性。并且PWM信号无需进行数模转换,可以节省数模转换电路,节约成本的同时可以降低系统的功耗。PWM波具有很好的抗干扰性,因为其采样控制的特殊性,只有当噪声完全大于模拟信号时才会改变输出结果,即噪声足够大时,高低电位才会不准,这因为这一特性,PWM技术也常用于通信事业。通信方面对于信号抗燥性要求较高,利用PWM技术将一路或者几路信号调制成1路PWM波输出,这延长了通信距离。只要在接收端进行合适的解调和放大,信号就会被还原成原来的样子,从而实现远距离通信。
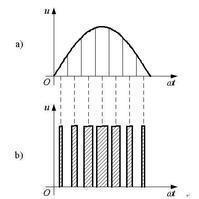
图1.1 PWM技术模拟波形
1.2选题意义及应用
随着电力电子装置的不断发展,其控制问题一直作为重要研究方向,而PWM技术作为其核心技术一直备受关注。各种PWM控制方法在不断创新,输出PWM调制方法也在不断的创新和进步。由于模拟信号控制电路的种种缺点,人们一直在寻求更好的控制方式。PWM控制理论就是其中之一并且得到落实研究的方法。最初始收到电子器件水平的发展,只有等脉宽PWM法和随机PWM法。因为当时晶体管限制在低功率,无法进行较高功率的调制。而后随着电子元器件的发展,出现了一种叫成熟的方法——SPWM法。SPWM法是通过控制逆变电路中开关器件的通断,使在相同的区间内,我们需要模拟的正弦波的面积和输出脉冲电压的面积相等,这样就保证了电路控制的效果一致。
PWM方式可以将电源的输出电压在运行条件改变的时候处于稳定状态,因为PWM波可以进行高速工作,这就使得模拟电路的工作效率大大提高了。
现如今,随着电力电子技术的不断发展,数字PWM已经成为了核心控制技术。例如利用PWM技术控制交流电机转速,模拟信号不稳定并且容易漂移,当我们用PWM技术来调节电机转速时就可以稳定,且精确的调控转速,PWM会输出一系列的脉冲信号,当IO口输出高电平时电机做功,当输出低电平时电机不做功,并且因为PWM信号频率很快(一般情况下),电机不做功时会因为惯性继续转动,所以电机会维持在一个较为稳定的转速上,当我们改变PWM波的占空比时,就会改变电机转速。在电机稳定状况下,占空比为1时,电机转动达到最快速度;占空比为0时,电机停止转动。PWM控制技术不仅仅应用于电机调速,还应用于各种电力电子行业,因为其优秀的性能,可以大大节约成本,并且因为功耗低,所以对能源节约方面也有一定的影响。
1.3国内外研究的现状
脉冲宽度调制(PWM)是执行模数转换的最常用方法之一,适用于各种领域的应用,包括信号的处理,控制,通信和电力电子。因为易于实施的特点使得PWM在许多控制系统成为了最优吸引力的方案。PWM使用具有固定幅度的矩形脉冲波,同时在每个周期期间调整脉冲宽度。在周期的占空比期间所有脉冲具有相同的幅度,但是根据控制目标在每个周期的开始确定符号。PWM与实践触发控制具有相同的理念,并且事实上已经证明PWM可以有效地利用通信和计算资源。PWM和事件触发控制可以看作是状态的开关控制法。在PWM方案中,控制信号从“接通”切换到“断开”的时间取决于每个周期开始时的采样状态。
因为电力电子设备的成本降低,可靠性,效率和功率能力的提高,以及更低的开发时间以及更高的应用要求,推动了业界最近推出的几种新型逆变器拓扑的开发,特别是介质 - 电压转换器。新的更复杂的逆变器拓扑结构和新的应用领域伴随着额外的控制挑战,例如电压不平衡,电源质量问题,更高的效率需求和容错操作,这些都需要并行开发调制方案。在dc / ac转换器的调制领域已经取得了的重大进展,在过去的几十年中,概念上几乎完全由经典的脉冲宽度调制(PWM)方法主导。
在大功率并网逆变器应用中,六开关三相逆变器是优选的拓扑结构,具有诸如较低电流应力和较高效率的若干优点。为了提高线路电流质量,预计并网逆变器的开关频率将增加。更高的开关频率也有助于减小滤波器的尺寸和成本。但是,更高的开关频率会导致更高的开关损耗。软开关技术是高功率转换器在较高开关频率下工作的选择,具有较低的开关损耗和较低的EMI噪声。利用基于PWM技术控制VSI的方法,可以使输出电压产生平衡,不平衡,谐波或其他期望的波形。
PWM技术还可以应用于控制变频器的输出波形,减少高次谐波带来的影响,并且因为减小了转矩脉动,有加速电路响应的效果。因为其电路简单,设计成本和器件成本都大大降低了。PWM在整流方面也有得到较好的应用,它能够使输入的电流和电网功率因数为1,真正的实现了对电网无影响的整流。
因为应用领域的多样性,对PWM控制方式提出了不同的需求,这也使PWM控制达到了十足的发展,有了多样的选择。当PWM技术数字化后,人们已经不满足于最初的模拟电压、电流的输出。他们希望能够通过PWM波控制电路更多参量,例如电路的效率。转矩脉动,因为PWM波可以精确方便地控制,还因为其数字性PWM波也被用于电路噪声的消除。 为了满足不同的需求,PWM技术在不断的发展,不断创新和进步。目前不少方法已经可以用于实践工作,在电力电力的各行各业得到应用。在这个飞速发展的时代浪潮中,高性能,稳定,能否精准控制是衡量一门电子技术的重要指标,对于PWM技术来说,其可以再高频电路中使用,响应速度快,并且控制十分简单,成本低廉,这些可以使PWM技术成为最广泛的控制方式。
1.4本章小结
本章简单介绍了PWM技术的原理和发展历史,PWM最初是一种模拟正弦波信号控制的方式,但因其稳定性强,能提高电路性能,抗噪声性能强等优点被人们逐渐重视起来,最初因为电子元器件的发展因素限制,不能有效的将理论来应用到现实中来,随着电子电力器件的发展,PWM技术成为了电子电力技术的核心技术之一。
第2章 多路PWM分析与设计
2.1 多路PWM功能分析
根据采样控制理论“冲量相等而形状不同的窄脉冲加在具有惯性的环节上,其效果基本相同。”,当在相同时域内,通过PWM调制输出的脉冲波的面积和原模拟信号的面积相同,其在电路中发挥的作用应该是一致的,但是PWM信号较原模拟信号可调,并且是不连续的,能够稳定电路的工作,所以PWM技术适用于现代大多数电子电力设备的控制。
PWM波信号高和低电位一致,表现形式为矩形脉冲波,简单的来说,PWM是通过对信号的采样,当其高于某一限定值时就输出高电位,低于时就输出低电位,所以占空比与信号的瞬时采样值成正比。
多路PWM现在大多数用于现代舵机转速控制,通过采样模拟正弦波来控制舵机的转速。多路PWM还可用于舞台灯光、民用照明的调光、空度控制等众多领域时需要用到PWM占空比进行调节。本次设计为要求为:
(1)AVR单片机输出多路PWM
(2)需要输出的PWM波占空比可调
(3)电路和程序简单,易懂
2.2 多路PWM结构设计
基于上面的多路PWM系统需求,本系统总体结构框图如图2.2.1所示。本次设计电路结构分3个部分,分别是控制器、时钟晶振、复位电路。时钟晶振电路提供芯片的外部时钟源,外部时钟源比内部稳定,以确保输出的PWM波频率不会变化。通过程序设计采用控制器的I/O端口作为PWM输出端实现多路PWM的实现。
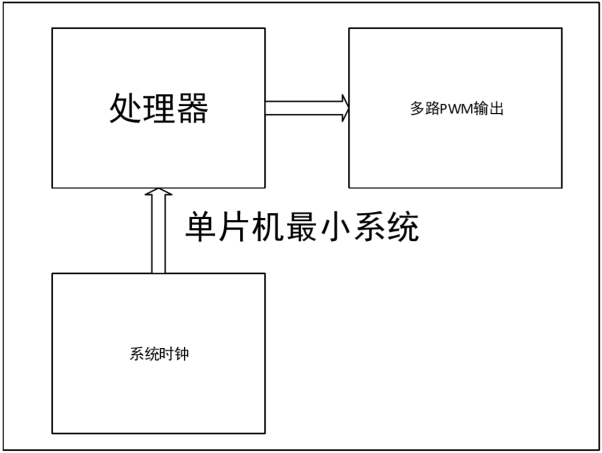
图2.1单片机最小系统架构
2.3 多路PWM实现及器件的选择
2.3.1 单片机的选择
AVR单片机是1997年由ATMEL公司研发出的增强型内置Flash的RISC精简指令集高速8位单片机。
单片机即嵌入式微控制器,其因为不用外接硬件,体积小,成本低被应用于各个领域。较其他的单片机 AVR单片机具有处理速度快、低功耗、高可靠性等优点。早期单片机发展受限于电子制作工艺水平、并且由于设计水平不高,所以导致电路功耗高,处理性能差。由于电路中存在噪声干扰,想要正常使用时就所以必须采取稳妥方案:将单片机的时钟频率进行分频,延长其机械周期。这种方案导致的后果就是单片机处理速度变慢,指令周期变长。后来的单片机虽然通过对技术的进步来对时钟的频率进行提高,还有缩小分频系数等措施,但这种做法显然治标不治本(51以及51兼容)。此间虽有某些精简指令集单片机(RISC)问世,但其依然沿袭对时钟分频的作法。
AVR的设计者认识到了当时这一技术困境,AVR单片机废除了机器周期,采用了单指令系统,并且有预取指令的功能,这打破了时钟分频这一技术困境。因为当时的复杂指令计算机进行编程时需要将指令完全的打出才会运行,这加大了编程难度和学习成本,AVR单片机采用了精简指令集,指令长度单位为字,一字之中就可包含操作数和操作码,可以实现流水作业,达成了高速执行指令。并且在这种高速性也保持了非常高的可靠性,这使得AVR单片机明显优于了旧式的单片机。
图2.2普通AVR单片机的外观
AVR单片机片内拥有大容量的RAM,能够有效地支持高级语言开发系统程序,如果遇到RAM不够的情况下,还可以进行外部拓展。为了更好的使用体验,AVR支持ISP和IAP烧写程序,并且具有高质量的闪存,无论是写入程序还是进行擦除都非常方便简单。闪存不具备断电时保存数据的能力,所以再加上了EEProm可以避免断电丢失,并且延长了单片机的寿命。
AVR单片机I/O口具有十分灵活性能,不仅能设定高低电位的输入/输出、还有高阻态输入等特性,本次的多路PWM的实现就是由AVR单片机的I/O口作为输出端口,利用程序软件来达到控制PWM输出的目的。
AVR单片机内具有独立的时钟源,但是片内时钟不如外界时钟源稳定,所以不经常使用。面对时钟,有多种的时钟分频器可以选择,可以分别供给UART/I2C/SPI使用,使用时钟分频器时需要注意看是否与定时器相匹配,不同的分频器对应不同的定时器,可以通过软件设定需要的分频系数。AVR单片机内自带有PWM输出模式,它是用定时器/计数器进行计数形成三角波,与输出比较寄存器匹配后,可以产生占空比、频率都可调的PWM波。这也是AVR单片机输出PWM波的最简单的方法。
2.3.2 AVR单片机的优点
AVR单片机有许多优点,其最大的优点在于结构的创新,AVR单片机采用了哈佛结构,这种并行体系结构可以使得程序、数据存储分离,在一个机器周期内可以同时进行访问,大大提高了程序执行速度。另外AVR单片机采用了超功能精简指令集,使其更容易的进行寻址等操作,并行程度非常的高,这进一步加速了系统的处理速度。
AVR单片机可以用C语言来进行编辑开发,市面上可以有许多可以为AVR单片机进行C语言编写的程序。AVR单片机内部的闪存,静态随机存取存储器、EEPROM容量较大,可以支持一些稍微复杂的程序运行。
它还是一种成本相对低廉的微处理器,片内具有多种集成电路,例如中断电路,每个端口都有可控的上拉电阻,这就会使电路结构简化。
2.3.3AVR单片机中断的实现
单片机的中断是指正在执行正常程序的单片机,由于出现一些需要立即进行处理的情况,处理器暂停现在正在进行的操作,转而执行中断服务程序,执行完毕后,再返回到原来程序继续执行的过程。
通过中断技术,在单片机上能实现很多功能,主要包括:
协调单片机运行速度:并不是所有的元器件都能够高速运行,但是由于单片机的自供给性,有时候必须要和一些低速设备数据交换或者进行控制,如果为了匹配低速设备的处理速度,无疑会使单片机的工作效率大大降低。想要不影响单片机的运行速度,这时候我们就需要利用中断来协调。当单片机需要和低速设备连接时,单片机在交换数据前会提前发送一个命令给低速设备,这不会影响单片机程序的运行。直到低速设备做好交换准备,单片机会执行中断,进行中断服务程序,也就是和低速设备的交换,交换完成单片机就会继续执行之前的程序,这样在不降低单片机的处理速度的情况下,就可以完成对低速设备的匹配,大大提高了单片机的应用范围,和系统的工作效率。
实时控制功能:所谓实时控制就是单片机能及时完成对受控形象的测量、计算、分析和控制,从而实收控程序保持良好的工作状态,并达到系统的使用要求。单片机的中断技术使控制参量能随时向计算机发出中断请求,已完成对数据的及时处理,因此它是单片机实现实时控制的一个必要要求。
实现故障的实时监测:当单片机运行时难免会遇到突发的紧急事故,如何及时发现并处理,就要用到中断技术。通过对于中断的执行。单片机就能对这些故障及时发现并进行自行处理。
单片机的中断由中断源控制,主要可分为,外部中断、定时/计时器中断、串行口中断、数模转换完成中断、EEPROM终端、模拟比较器中断。
2.3.3ATmega16PWM模式的实现
ATmega16自带有PWM模式,ATmega16的中断波形产生模式分为4种:相位修正PWM、CTC、快速PWM、相位与频率修正PWM。这里简单的介绍一下快速PWM模式,打开快速PWM模式,ATmega16内部计数器会开始计数,当这一计数值达到某一值(这个值存储于比较寄存器)时,会把ATmega16的一个固定引脚位的电平置0,而计数器达到最大值时,会把之前的引脚置1,这样通过改变寄存器中的值就能得到占空比不同的PWM信号。
这种输出方式输出的PWM波频率较高,占空比可调,且能够比较简单快速的进行设置然后输出,但是不能调节它的相位。这一模式可以适用于舵机的转速调制,LED灯的灯光控制等一系列相位固定的硬件系统。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: