可重构综合机电实训平台的输送装置虚拟仿真系统毕业论文
2020-02-19 07:02
摘 要
近些年来,计算机技术迅速发展,在虚拟仿真方面的技术越来越成熟、产品越来越多,涉及到的领域也越来越广泛。在机械制造领域、实验教学领域有着非常广阔的应用前景。所以在很多高校都建立了自己的虚拟仪器实验系统,以此来解决许多实验教学中的不足,比如实验设备有限、实验教学人员太少、实验设备占地面积大等问题。并且,由于虚拟仪器和互联网技术的结合,虚拟仪器的更新换代和维护也变得更加简单。
本文针对可重构的机电实训平台输送装置虚拟仿真系统进行开发,首先是在Pro\E三维建模软件中按照图纸建立机电实训平台输送装置的三维模型。然后需要对模型进行减少复杂曲面特征的过程,并且需要导入Cinema 4D软件将破碎的结构进行融合、调整零件坐标轴等。再然后要把渲染后的模型导入到Unity 3D虚拟仿真软件中进行虚拟仿真开发,实现在实际的机电实训平台中输送装置进行投料、分拣、转运、传感器识别等功能。完成Unity 3D中的虚拟仿真开发后,需要将这个Unity项目发布到WebGL平台,然后进行Html网页展示端的设计,包括web端跟Unity进行数据传输,实现让用户通过网页端使用机电实训平台的输送装置虚拟仿真系统,进行实验和教学。
论文主要研究了可重构的机电实训平台的输送装置进行投料、分拣、转运过程的仿真实现。
关键词:输送装置;虚拟仿真;Unity3D;设备;实验台
Abstract
In recent years, with the rapid development of computer technology, the technology of virtual simulation is becoming more and more mature, more and more products are produced, and more and more fields are involved. It has very broad application prospects in the field of mechanical manufacturing and experimental teaching. So many colleges and universities have established their own virtual instrument experimental system to solve the shortcomings of many experimental teaching, such as limited experimental equipment, too few experimental teaching staff, experimental equipment occupies a large area and so on. Moreover, because of the combination of virtual instrument and Internet technology, the updating and maintenance of virtual instrument become simpler.
In this paper, a Reconfigurable Virtual Simulation System for the conveyor of the electromechanical training platform is developed. Firstly, the three-dimensional model of the conveyor of the electromechanical training platform is established according to the drawings in Pro E three-dimensional modeling software. Next, it is necessary to reduce the feature of complex surface, and import Cinema 4D software to fuse the broken structure and adjust the coordinate axis of parts. Then, the rendered model will be imported into Unity 3D virtual simulation software for virtual simulation development, realizing the functions of feeding, sorting, transporting and sensor identification in the actual electromechanical training platform. After the development of virtual simulation in Unity 3D, we need to publish the Unity project to WebGL platform, and then design the Html web page display end, including data transmission between web end and Unity, so that users can use the virtual simulation system of conveyor device of electromechanical training platform to carry out experiments and teaching.
This thesis studied that, the simulation realization of the conveying device of reconfigurable electromechanical training platform in the process of feeding, sorting and transporting.
Key Words:delivery mechanism; virtual simulation; Unity3D; equipment; experimental station
目 录
第1章 绪论 1
1.1 研究背景 1
1.2 国内外研究现状 1
1.2.1 国外研究现状 1
1.2.2 国内发展现状 2
1.3 研究内容及意义 2
1.3.1 研究内容 2
1.3.2 研究意义 2
1.4 论文内容安排 2
第2章 虚拟仿真系统总体设计 4
2.1 系统开发工具 4
2.2 系统设计 4
第3章 结构设计及建模 6
3.1 输送装置简介 6
3.2 输送装置主要结构设计选型 6
3.2.1 传送带的选型 6
3.2.2 传送带驱动电机的选型 6
3.2.3 轴承的选型 7
3.2.4 导杆的选型 7
3.2.5 真空吸盘的选型 8
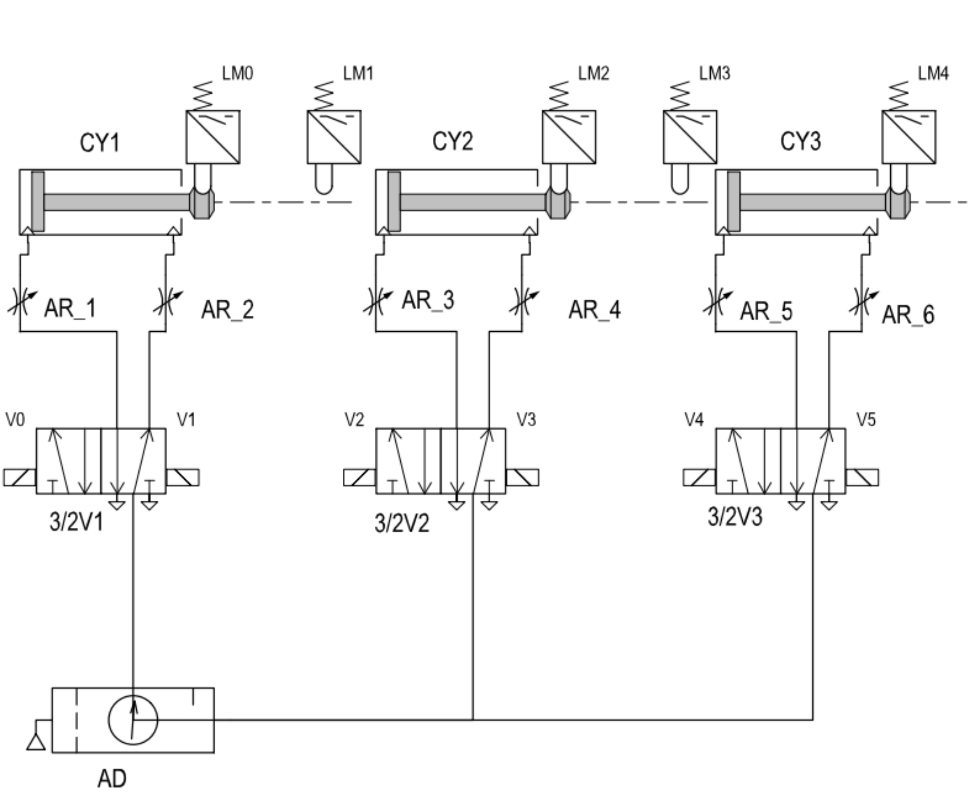
3.2.6 气缸的选型 8
3.2.7 传感器的选型 9
3.2.8 输送装置整体布局 11
3.3 三维模型的建立与优化处理 11
3.3.1 输送装置三维模型的建立 11
3.3.2 输送装置三维模型的优化 11
3.3.3 输送装置三维模型的处理 12
第4章 虚拟仿真系统技术与实现 13
4.1 虚拟仿真基本需求 13
4.2虚拟仿真基本方案 13
4.3 电源模块设计 13
4.3.1 按钮物理效果设计 13
4.3.2 按钮指示灯设计 14
4.4 投料装置设计 14
4.5 传送带装置设计 15
4.5.1 传送带外观效果设计 15
4.5.2 传送带运动实现 16
4.6 转运装置和吸盘设计 17
4.6.1 转运机械臂运动设计 17
4.6.2 吸盘的效果设计 17
1. 吸盘的吸取效果 18
2. 吸盘的释放效果 18
4.7 拨杆运动设计 18
4.8 物块信息设计 19
4.9 传感器系统设计 20
4.9.1 颜色传感器设计 20
4.9.2 磁涡流传感器设计 20
4.9.3 接近传感器设计 21
4.9.4 计数传感器设计 22
4.10 物块分拣系统设计 22
4.10.1 分拣系统设计 22
4.10.2 分拣方式设计 23
4.11 用户界面设计 23
4.12 交互界面整体布局 25
4.12.1 交互界面设计 25
4.12.2 实时数据面板 26
结 论 27
参考文献 28
致 谢 29
第1章 绪论
1.1 研究背景
在现在的许多学校和工厂内,学生和工人在上岗工作之前都需要进行必不可少的实训工作。在传统的实地实训方法上,存在着许多问题。比如,由于设备的数量不够、指导老师的人数少而实训学生的数量多、场地狭小等限制因素使许多学生的实训教学不能达到应有的效果。并且,在实地实训中还可能由于学生操作不当、指导老师没能顾及到现场等原因出现安全事故,造成不必要的人员伤亡和设备损坏。
但是在已有的经济条件和发展状况下,并不适宜通过投入大量教师资源和大量购进实训设备来解决这些问题。而虚拟仿真实训教学可以使已有的实训老师能够精力更加集中地应对学生的实训教学,认真备课、统一指导和释疑。实训学生也能不受设备数量和老师数量的限制,更加平等地享受到同等的实训教学指导和同样的教学资源,使教学资源更加有效地利用起来。
现在,虚拟仿真实验教学运用在各个行业的各个环节。其中,我们熟知的有航天飞行器驾驶员的培训上,由于每一次飞行的消耗和维护费用高昂,培训飞行员如果采用虚拟仿真实训教学系统,则可以省去一大笔培训的费用,提高培训飞行员的效率和降低一定的国防支出。而现在,也有许多地方出现了虚拟现实(Virtual Reality)来进行车辆驾驶的培训,这一种适用范围的扩展也丰富了虚拟仿真实训的用途。
1.2 国内外研究现状
1.2.1 国外研究现状
美国是世界上最早开始研究虚拟现实技术的国家,其研究水平也处于世界顶尖行列。在虚拟现实领域的基础研究上,美国主要集中在用户界面、感知层面、VR硬件和后台软件4个方面,可视化军事仿真自从上世纪90年代起就开始出现,最近10年发展尤为迅速,例如美国的 ISAAC 系统、MUVES3系统、TARVAC系统,[1] 在战场评估、作战演练中发挥着重要的作用,成为衡量军事实力的新标准。
在英国,大学内的开放虚拟科学仪器实验室建设的三个目标是: ①成为研究实验教学改革和探索实验教学改革的在线中心; ②为现场(异地)实验数据提供进行严格且科学真实的分析手段; ③构建具有3D沉浸式环境,并且可支持远程控制、交互式多媒体实验、虚拟仪器以及在线分析与研究活动的研发和实验平台。
1.2.2 国内发展现状
我国的虚拟现实技术起步比较晚,相对于一些发达国家的技术程度,在虚拟仿真技术上还有一定的差距。在线开放虚拟仿真实验教学项目是我国深化实验教学供给侧结构性改革的一个成果,也是信息技术与实验教学深度融合后的必然产物。自从2013年起,教育部在全国范围内启动了国家级虚拟仿真实验教学中心的建设工作以来,江苏省普通本科高校总共获批了的国家级虚拟仿真实验教学中心有31个,占全国总数(共300个)的10.33%。平均每个中心开设虚拟仿真实验教学项目达到了百余项,并且这些项目运用的信息化技术越来越成熟先进。目前,虚拟仿真实验教学已经从最初强调信息化网络平台建设的阶段,进入到强调优质项目资源的建设和应用的深入发展阶段。[3]
1.3 研究内容及意义
1.3.1 研究内容
本文旨在以虚拟仿真技术为基础,开发可重构综合机电实训平台的输送装置虚拟仿真系统,完成对可重构综合机电实训平台的输送装置的投料、分拣和转运过程的模拟,实现仿真结果在网页端展示,其中涉及的研究内容有输送装置主要结构的选型和设计,输送装置本体模型的建立以及模型的优化处理,虚拟仿真系统的开发,交互界面的开发等。
1.3.2 研究意义
虚拟仿真实训教学以信息技术和互联网技术应用为本质特征,既适应了信息时代高等教育开放办学、资源共享的变革要求,又符合了“互联网 ”的理念。为学生开展探究性学习、创新实践和自主实验提供了优质的教学资源、先进开放的平台手段。在提高人才培养质量的同时,也为实验教学改革和实验室建设注入了新的活力。
1.4 论文内容安排
本文的内容及结构一共分为五章,主要安排如下:
第一章:绪论。在这一章里首先介绍了本文的研究背景,接着对计算机虚拟仿真的技术进行了简单的介绍,然后分析了虚拟仿真技术现在在国内和国外的发展情况,最后介绍了本文的研究内容和研究意义。
第二章:系统总体设计。包括开发步骤等。
第三章:机构的选型、计算。三维模型的建立与处理。本章首先介绍了输送装置的功能模块,主要包括执行机构、传感器,随后进行了主要设备的选型,包括传感器、步进电机的选型,最后简单地介绍了三维的建立和优化处理。
第四章:进行虚拟仿真系统关键技术研究。本章首先介绍了输送装置中涉及的功能需求,随后对Unity中的C#脚本、脚本语言和虚拟仿真系统的关键技术作了介绍。网页交互界面的构建以及虚拟仿真项目的发布。将该虚拟仿真系统发布WebGL到了网页端,随后进行了网页交互界面的设计布局,并且实现Web网页端与Unity之间的数据传输。
第2章 虚拟仿真系统总体设计
2.1 系统开发工具
本设计的三维建模软件是Pro/E,在Pro/E内完成三维模型的建模后,导出为obj格式的文件。在Cinema 4D软件中,把obj文件中的三维模型进行合成和渲染、调整零件坐标轴,导出为Fbx文件。Fbx文件可以导入到Unity3D中进行虚拟仿真开发,并且发布在WebGL平台,最后通过Html网页设计和JavaScript代码的嵌入,完成本次可重构机电平台的输送装置的虚拟仿真任务。
2.2 系统设计
可重构综合机电实训平台的输送装置虚拟仿真系统,是为了实现输送装置的工作过程仿真,应建立精确的输送装置本体模型,设计出合理的交互界面以实现对输送装置工作过程的虚拟仿真操作。
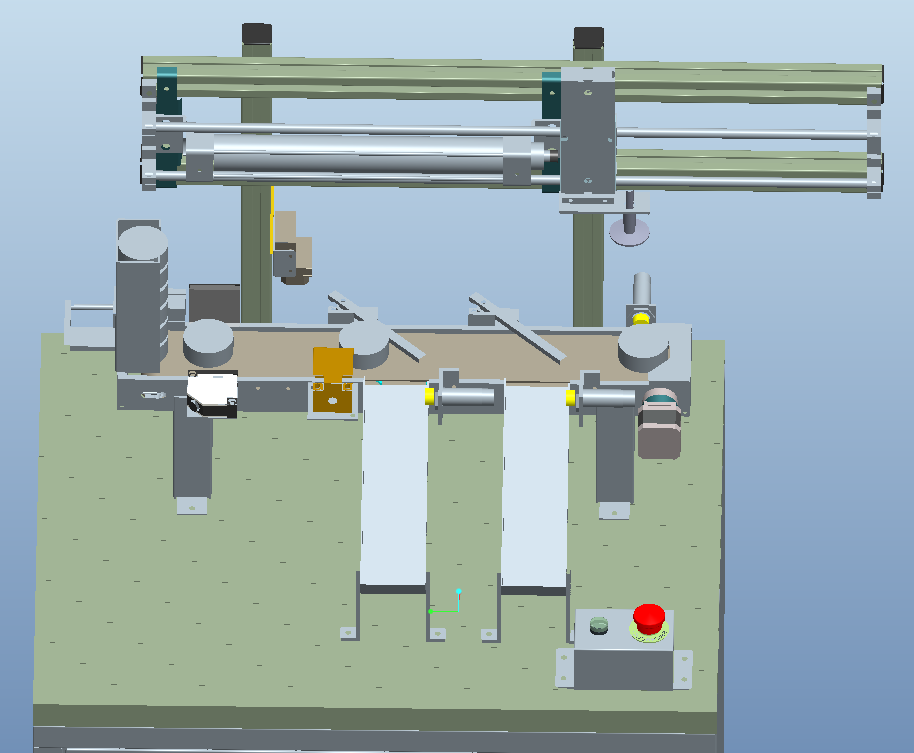
根据系统的功能分析,本系统的总体框架可以分为三部分,分别是三维模型、输送装置Unity虚拟仿真系统和网页交互界面。实现了输送装置工作过程的模拟仿真,图2.1为虚拟仿真系统的总体框架设计图。
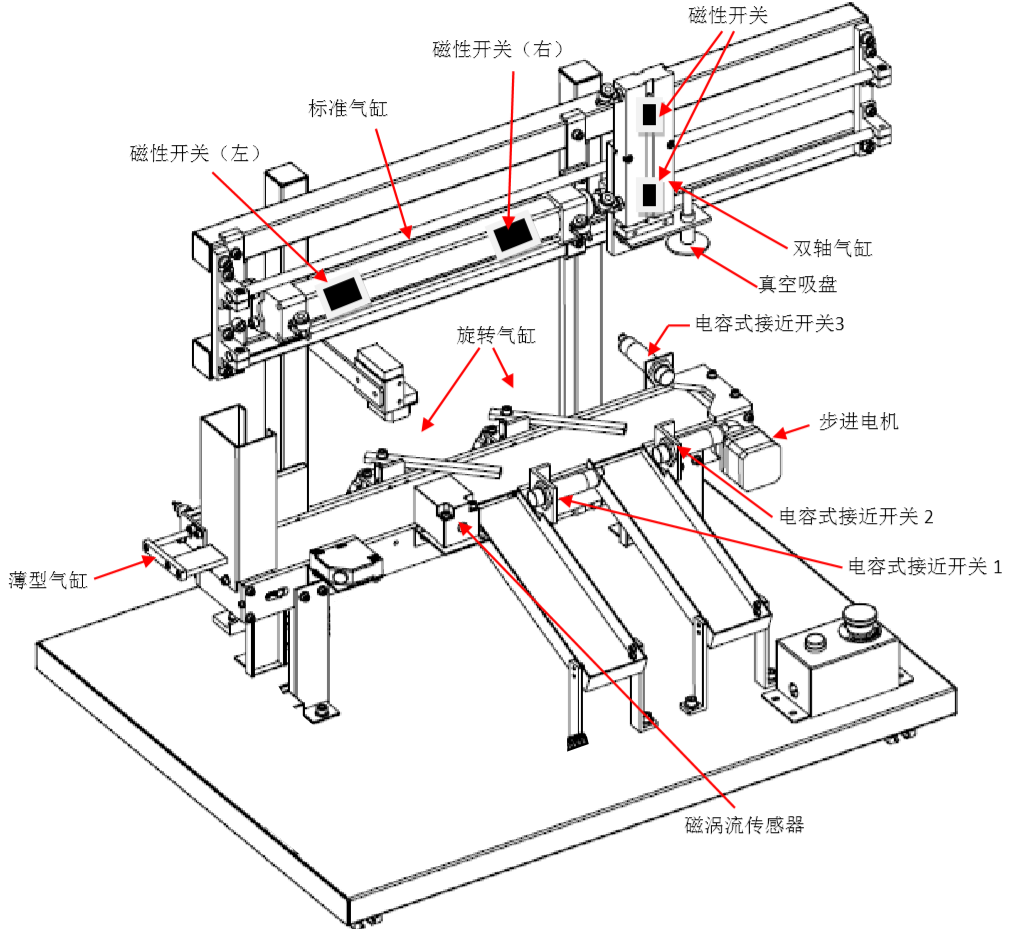
图2.1 输送装置总体结构
(1)三维建模:三维建模模块指的是对输送装置中包含的箱柜、传送带、料斗、支架等结构的制作。通过Pro/E、Cinema4D软件,将模型最终转化为FBX文件,然后导入Unity3D中。
(2)虚拟仿真系统:虚拟仿真系统最终通过Unity中的WebGL发布在网页端。用户最终就可在网页上了解产品的工作过程。
(3)交互界面:交互界面是虚拟仿真系统的重点模块。利用挂载在对象的脚本程序,通过鼠标点击事件来对三维模型进行各种操作,实现人机交互,完成启动、急停、速度调节、视角转换、模式选择等功能。
第3章 结构设计及建模
3.1 输送装置简介
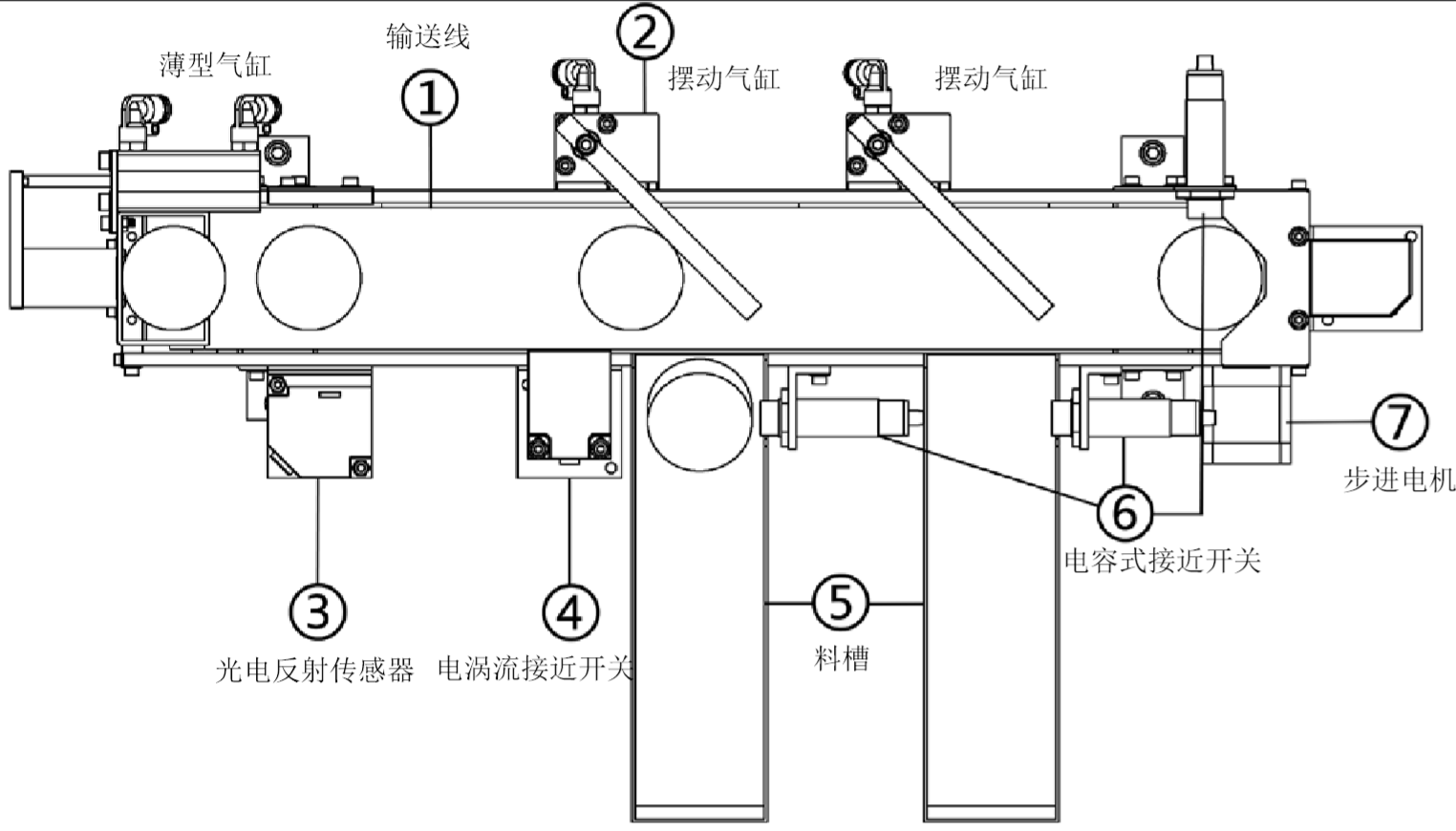
可重构综合机电实训平台的输送装置是一套由单片机测控卡、步进电机、传感器等组成的模块化、积木式的实验装置,目前主要用于一些综合控制类实验课程。该产品涵盖机械、电子、气动及控制等多学科知识,提供从实验对象、信号获取、信号分析以及运动控制等相关专业知识的实验环节。其总体结构图如图3.1所示。
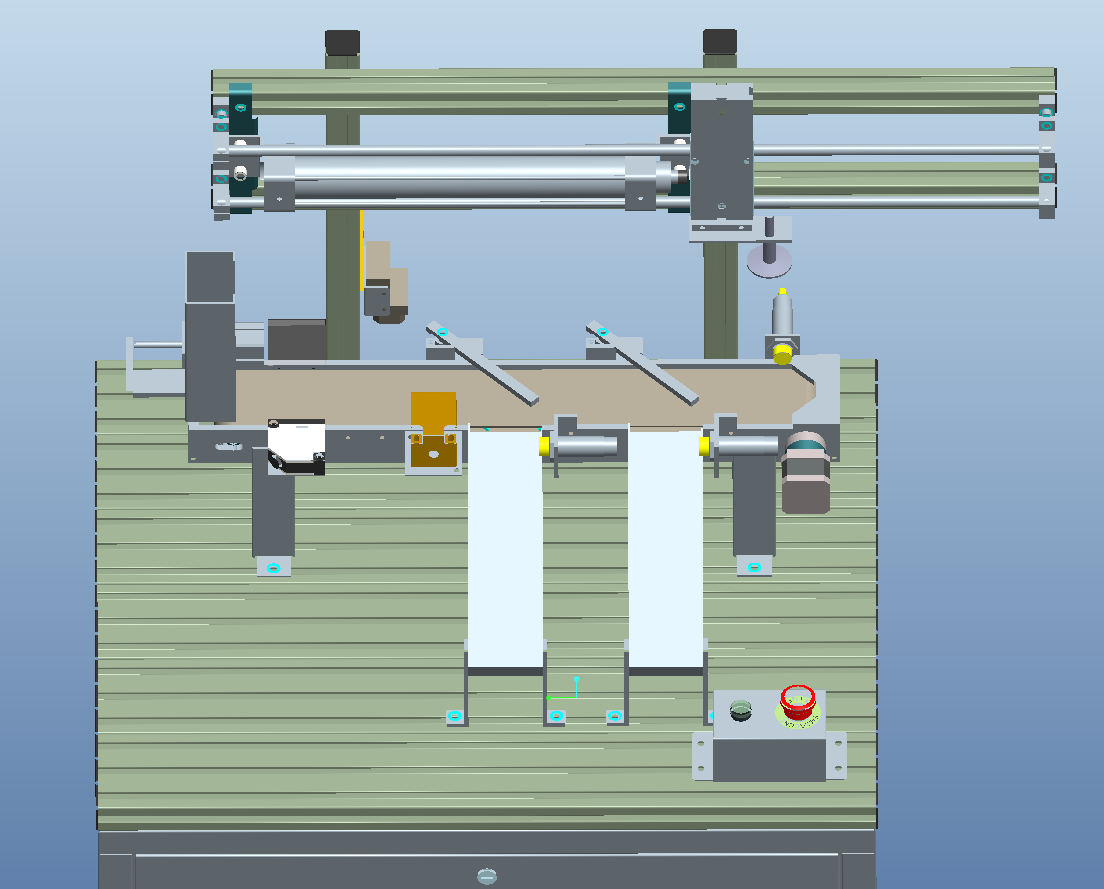
图3.1 虚拟仿真系统总体框架
3.2 输送装置主要结构设计选型
本文中工件的材料是铝合金,其重量大约为:
实验台的规格为850mm×540mm。
3.2.1 传送带的选型
输送装置在运输过程中需要使用到传送带,使物块通过传送带运送,传送带的长度约为500mm,宽度至少需要能容纳物块直径的1.25倍,所以宽度为68mm,选择的传送带型号是NN 70*1200 。
3.2.2 传送带驱动电机的选型
传送带的驱动电机一般可选步进电机或伺服电机,两者在控制方式上相似,但在性能和应用场合上有一定的差异,两者的性能、应用场合也不同。
本文中,传送带的负载均较小,最大工作速度为1000mm/s,因此速度较低,再综合成本等多方面的因素,本文选用步进电机作为传送带的驱动电机。
根据东莞市远程自动化科技有限公司提供的关于的产品信息,可选择57mm系列步进电机,设定传送带驱动水平负载的效率为90,带传动效率为95,驱动轮直径为40mm,负载重量为1kg,则负载力矩为:
设定电机的最大转速为1000r/min,因此可选用深圳市研控自动化科技有限公司生产的YK57HB76-04A型号步进电机,该电机的主要工作参数如下:
步距角:1.8°
保持转矩:2.0N·m
转子惯量:480g·cm²
3.2.3 轴承的选型
传送带除了驱动电机带动,左端还需要一对轴承来承受传送带的径向载荷,而轴向载荷比较小,故采用深沟球轴承来完成设计。
由于设计的传送带电机的传动轮直径为30mm,为了对称设计,查表GB/T 276-1994可以找到6001型深沟球轴承,其基本参数为外径D=28mm,内径d=12mm,B=8mm。
轴承寿命公式: (3.1)
计算得该轴承的寿命为L= 12282.5(h),12282.5小时,满足设计要求。
3.2.4 导杆的选型
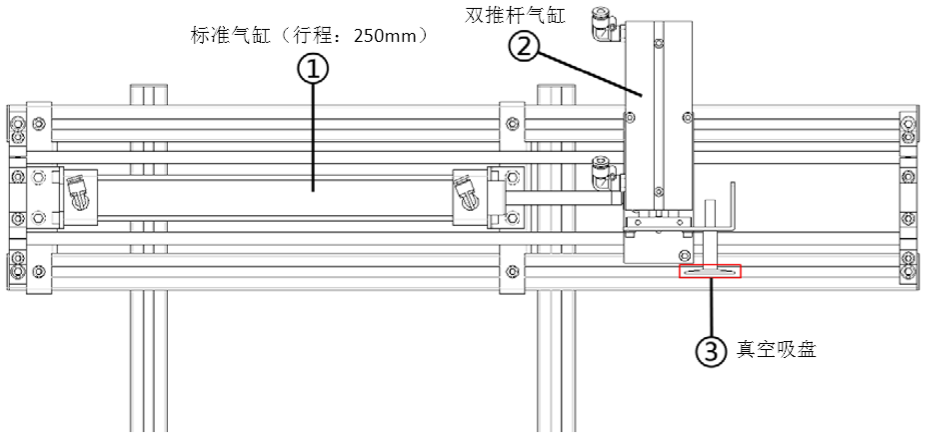
输送装置在转运过程中需要使用到直线模组,由于机械臂滑台规格为250mm×240mm,因此需要导杆的有效行程至少为250mm,可设计导杆的长度为250mm,故选择SMC250型导杆。
该直线模组由滑台部分和气动吸盘等其他附属部分组成,工作是靠气缸来驱动的,滑台的工作进给是由标准气缸来实现的,其具体的工作参数如下:
负载:15kg
导程:250mm
扭矩:0~3
精度:lt;=0.05mm
行程:250mm
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: