5目球型相机毕业论文
2021-02-28 09:02
摘 要
全景图(全景照片)是一种通过相机以一视点出发,进行360°完整场景拍摄并通过软件进行拼接的图片。因为这种图片允许用户通过特定图片浏览器与输入设备,选择观看不同的场景,所以相对与一般的图片,它的可玩性更高,目前的使用十分的普遍。目前全景图的采集设备都存在着一定的问题,如相机内部参数不统一,数据没有统一存储与归档等。为了解决这个问题,本文基于STM32F1系列单片机,提出来一种多相机系统。该相机系统主要有子相机和控制主板组成,子相机主要有CPLD,相机拍摄模块和SDRAM组成。该方案解决了大多数单片机在多相机大数据的瞬间存储问题。在软件上,通过最大限度的对子相机与单片机中相关硬件资源的抽象,提高了子相机扩展的灵活性,通过任务队列的形式提高了单片机接口的利用率与效率。
关键词:多相机系统;STM32F1系列;全景图
Abstract
Panorama is a picture of a 360 ° full scene shot with a camera at a viewpoint, and is stitched by software. Because this picture allows the user through a specific picture browser and input device, choose to watch different scenes, so relative to the general picture, its playability is higher, the current use is very common. Panorama of the current collection of equipment there are some problems, such as the camera internal parameters are not unified, the data is not unified storage and archiving. In order to solve this problem, this article based on STM32F1 series of single-chip, put forward a multi-camera system. The camera system is mainly composed of sub-camera and control board, sub-camera mainly CPLD, camera shooting module and SDRAM composition. The solution solves most of the single-chip microcomputer in the multi-camera large data instantaneous storage problem. In the software, through the maximum of the camera and the microcontroller hardware resources related to the abstraction, improve the flexibility of the expansion of the sub-camera, through the task queue to improve the microcontroller interface utilization and efficiency.
Key Words:Multi - camera system;STM32F1 series;Panorama
目 录
第1章 绪论 1
1.1 课题研究背景 1
1.1.1 运用的需求 1
1.1.2 多目相机的由来 1
1.2 国内外研究现状 2
1.2.1 国外研究现状 2
1.2.2 国内研究现状 3
1.3 研究意义 3
1.3.1 目前全景采集方式存在的问题: 3
1.3.2 解决的问题 4
1.4 本文的组织安排 4
第2章 5目全景相机的硬件设计 5
2.1 5目全景相机的整体硬件设计 5
2.2 5目相机子相机的硬件设计 5
2.2.1 子相机的设计需求: 5
2.2.2 子相机的硬件组成: 6
2.2.3 拍照模块(0V5460) 6
2.2.4 SDRAM(W9864G6IH) 8
2.2.5 CPLD(EPM240) 12
2.2.6 工作原理和电路原理图 12
2.2 控制主板的设计 13
2.2.1 CH340 14
2.2.2 STM32 15
第三章 5目球型相机的程序设计 16
3.1 软件需求概括 16
3.2 条件与限制 16
3.3 总体设计 16
3.3.1 总体结构与模块接口设计 16
3.3.2 模块功能 17
3.3.3 软件实现 17
第四章 总结 26
参考文献 27
致谢 29
第1章 绪论
1.1 课题研究背景
1.1.1 运用的需求
传统的相机系统一般都是由单个光轴的成像结构组成,一般的设计都是依据单个光轴的优化来设计,都是通过像素来提高最终图片的分辨率。但是这些缺不能使相机的视场角的得到拓展,从而限制了相机系统探测性能的提高。
随着科学的不断发展,社会的不断前进。视场角作为摄像系统重要性能指标,其对于设想系统。正如人眼对于我们。为了实现大视场角的需求,而单光轴的拍摄系统却很难满足。固需要设计一种多目全景相机系统,即5目球型相机。
1.1.2 多目相机的由来
多目相机又称复眼相机。多年来,人们通过从自然界中各种生物的外形以及外形产生的一些功能得到了了一系列的启示。通过科研以及科学技术,将这些相结合,慢慢地形成了一系列的科学技术成果。
早在一百多年前,昆虫的复合眼睛的结构开始吸引许多研究者的注意。最近,随着微透镜技术的蓬勃发展,生物激发的视觉研究蓬勃发展。基于复合眼框架的图像采集系统的发展也比以前发展得更快。
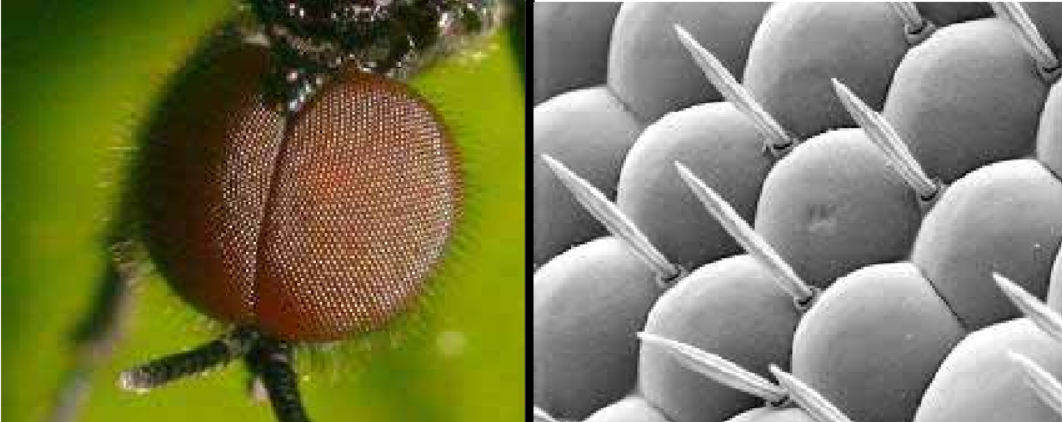
图1.1 昆虫的复眼结构
昆虫的复眼是由分布到曲面上的很多个结构和功能相同的小眼组成[1-4]。小眼的数量由10到3万个不等,所有的小眼呈放射状排布在球面基底上,每个小眼指向一个特定的方位,实现对该方位内物体图像的捕获,所有的图形进行融合之后完成大视场空间内的像。
昆虫对物体移动的觉察能力却很敏锐,当运动着的物体快速从面前经过时,人的眼睛需要在5%秒的时间内,才能看到物体的轮廓,而且是模糊的;但是昆虫复眼只需要在1%秒时间内就可以识别出物体的形状,并鉴识出运动物体的大小外形。按照这种特点进行探索,人类发现某些具有复眼的昆虫有极强的视觉范围和敏锐的追踪本领。此外,与单眼有限的视觉范围相比,复眼的另外一个重要的优势是它不仅占据的体积很小,而且还具有近乎实现全景图像视觉范围的庞大视场。经由钻研探索生物界中现存的昆虫复眼的构造以及复眼的工作方式原理的过程,利用仿昆虫复眼的布局构造,构建了复眼相机的模型。
1.2 国内外研究现状
如今,仿生技术随着时间的不断进步发展,科学家通过昆虫本身复眼的启发,结合其复眼视场大、体积小、质量轻等优点,提出了仿生的人工复眼成像系统,即把当下比较流行的单孔径光学系统换成了多孔径光学系统,从而实现整个系统小型化、轻量化、大视场等目的。通过对昆虫复眼结构的仔细研究,很多人采用阵列模式排列多个小透镜的方法来制造人工复眼。
1.2.1 国外研究现状
在国外,德国、美国、日本等国家的科学家也逐渐的开展了复眼相关的科学研究,在复眼的结构阶级方面取得了一定的研究成果。德国的科学家Jacques等人成功研制出了一个平面型并列复眼。采用阵列布置的方式,由三层结构组成,即:光聚合物制作而成的微透镜列阵结构,玻璃支撑体结构,金属层。该结构是一种小型化集成化的复合结构。美国也开展了小型化人工复眼结构的制备技术研究[5-8]。美国伯克利大学提出了一种人工复眼结构的制备方法,复眼结构包括8000多个子眼,通过微加工处理,在曲面基底上制作了人工的仿真结构。日本科学家在平面复眼方面做出了大量的科学研究[9-12],提出了比较著名的TOMBO型人工复眼结构,这是由三层不同的结构组成,即:微透镜列阵层,隔离层,信号采集层。顶层的每个单元和中间层的结构相互组成一个成像空间。韩国的科学家也开展了相关研究,通过微透镜列阵用作复眼结构中的单个子眼结构,通过其与微电子技术相结合,制作出了一种新型的人工复眼相机。
1.2.2 国内研究现状
在国内,中国科学技术大学的研究小组也对复眼相机的结构开展了一系列的研究[13-17],研究出了一种以大视场目标定位的复眼系统标定方法,设计了关于复眼结构和图像采集系统,其利用自己研制的系统开展了该复眼结构的结构设计研究工作。北京理工大学的研究小组在复眼大视场的原理基础下,提出了一种多目标探测的环形探测器设计方案。该探测器由6个光电探测单元组成,每个单元包括镜头和线阵CDD,每个之间视场角为60°。整体相互组合一起构成一个360°的大视场区域,可以实现多个目标的探测与跟踪[18]。2012年,西安交通大学的关于复眼方面的研究团队,通过利用微光刻技术、软模压印技术,成功的制备出了一种中小型的曲面复眼结构。
1.3 研究意义
目前用于全景图的采集方式主要有以下的两种,一种是通过单相机与云台结合,进行多次旋转异步采集;一种是通过多相机系统控制多个相机实现同步采集。
1.3.1 目前全景采集方式存在的问题:
通过单相机与云台结合,进行多次旋转异步采集存在以下的一些问题:
ⅰ. 采集的步骤过于繁琐,需要的大量的人工操作,采集效率低下;



